Kapat 
Choose your language

Video eğitimleri
Universal Robots ürünlerini kullanmaya başlamanıza yardımcı olmak için tasarlanmış adım adım programlama örneklerini ve eğitimleri keşfedin.
Bir UR robot programlamanın temel ilkelerini öğrenmek istiyorsanız, hem UR20/30, e-Serisi hem de CB3 robotlarına ilişkin interaktif e-öğrenim imkanı bulabileceğiniz Ücretsiz e-Eğitim bölümüne göz atın.

1 UR Studio'da Projelerle Başlarken
UR Studio'da şablonları veya özel ayarları kullanarak robot programlama projelerini nasıl oluşturaca…
 1 dk. 21 sn.
1 dk. 21 sn.


2 UR Studio'da İstasyonu Gezinme
UR Studio'da pan, orbit, move ve rotate araçlarını kullanarak istasyon görünümünü ve robot nesneleri…
1 dk. 55 sn.

3 UR Studio Kataloğu ile Çalışma Hücrenizi Oluşturun
Katalog'u kullanarak standlar, konveyörler, paletler ve kol ucu araçları gibi bileşenleri ekleyerek…
1 dk. 47 sn.

4 UR Studio'da Çarpışma Algılama
UR Studio'nun robot çalışma hücresi kurulumunuzdaki çarpışmaları nasıl vurguladığını keşfedin ve güv…
0 dk. 40 sn.

5 UR Studio'da Robot Erişilebilirliğini Test Etme
UR Studio'da robot erişilebilirliğini değerlendirmeyi öğrenin ve çalışma hücresi düzeniniz için en u…
1 dk. 29 sn.

6 Sensör ile Konveyör Kontrolünü Otomatikleştirme
UR Studio'da sensörler ve sinyal bağlantıları kullanarak konveyör davranışını otomatikleştirerek bir…
1 dk. 18 sn.

7 UR Studio'ya 3D Modeller İçe Aktarma
GLB veya GLTF formatlarını kullanarak özel 3D modelleri UR Studio'ya aksesuar, iş parçası veya kol u…
0 dk. 48 sn.

8 Özel İş Parçalarını UR Studio'ya İçe Aktarma
UR Studio'da harici 3D modelleri iş parçası olarak içe aktarma ve yapılandırma, doğru simülasyon içi…
1 dk. 11 sn.

9 UR Studio'da Kol Ucu Araçlarını İçe Aktarma ve Yapılandırma
UR Studio'da çarpışma ayarlamaları ve kıskaç bölgesi kurulumu dahil olmak üzere özel kol ucu araçlar…
1 dk. 24 sn.

10 UR Studio'ya UR Cap paketlerini yükleme
UR Studio'da URCap paketlerini yüklemeyi, kurmayı ve yönetmeyi öğrenin, gelişmiş işlevsellik için ön…
1 dk. 03 sn.

11 Gölge Programlama ile doğrudan öğretim noktaları
UR Studio'da robot hareketlerini, robotu manuel olarak hareket ettirmeden gölge programlama kullanar…
1 dk. 06 sn.
1 PolyScope X GUI'sine Giriş
Bu modülde, PolyScope X'in yepyeni GUI'sini ve neyi nerede bulacağınızı göreceksiniz.Sonraki modülle…
2 dk. 35 sn.
2 Sihirbazı kullanarak bir Aracı Yapılandırma
Bir aletin Yükünü, Ağırlık Merkezini (CoG), Alet Merkez Noktasını (TCP) ve yönünü yapılandırmak için…
3 dk. 28 sn.

3 Basit bir Seç ve Yerleştir Programı nasıl yapılır
Bu videoda PolyScope X kullanarak basit bir Seç ve Yerleştir programının nasıl yapıldığını gösteriyo…
3 dk. 27 sn.
4 Programınızın okunabilirliğini ve yeniden kullanılabilirliğini artırmak için Modülleri ve fonksiyonları kullanma
Modül ve fonksiyonların nasıl oluşturulacağını öğrenin. Bu, programınızın okunabilirliğini artıracak…
2 dk. 49 sn.
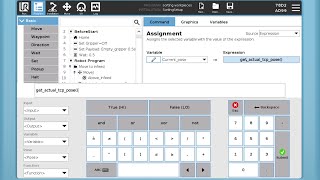
5 Ara nokta sayısını en aza indirmek için pozisyonları Ofsetlerle dönüştürün
Kullanıcı tanımlı bir ofset kullanarak bir ara noktayı nasıl dönüştüreceğinizi öğrenin. Bu, programı…
2 dk. 18 sn.

6 Uygulamanızda bir Izgara Oluşturun
Gereken ara nokta sayısını en aza indirmek için PolyScope X'teki Izgara özelliğini nasıl kullanacağı…
2 dk. 27 sn.
7 Izgara, Modüller ve İşlevler ve Dönüşümler kullanan basit bir CNC uygulaması
Bu modülde özellikler: Modüller ve Fonksiyonlar, Izgaralar ve Ofsetlerle Dönüştürme basit bir CNC uy…
3 dk. 21 sn.
8 Operatör ekranının özellikleri
Operatör ekranının nasıl ayarlanacağını öğrenin. Giriş değişkenlerinin ve seçimlerin operatör tarafı…
3 dk. 45 sn.

9 CNC Torna tezgahı şablonunun kısa tanıtımı
Bir CNC Torna Makinesi uygulaması için şablonun kısa bir incelemesine bakın. Temel yol noktalarını ö…
1 dk. 26 sn.
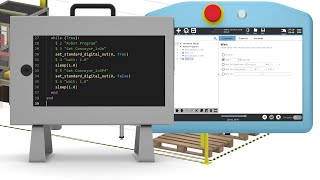
1 URScript'e Giriş
URScript'i daha önce nerede kullandığınıza dair bir giriş yapın. En yaygın işlevleri nerede bulacağı…
7 dk. 46 sn.

2 Sistem yürütme mimarisi
URScript'in sistem yürütme mimarisine genel bakış, “neyin nereye gittiğini” açıklamak için https://w…
8 dk. 54 sn.
3 Node'dan URScript'e dönüştürme
Bir programın URScript'e nasıl dönüştürülebileceğine dair basit bir yol gösterme. Bu, URScript ile ç…
3 dk. 33 sn.
4 Dashboard Sunucusu
Dashboard Sunucusuna bağlanmak ve robotun başlatılmasını sağlamak için bir TCP/IP Soket bağlantısını…
4 dk. 09 sn.
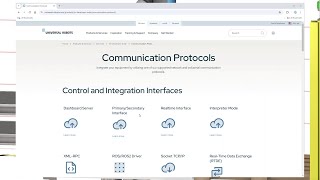
5 Arayüzler ve uzak URScript
PolyScope 5'in farklı iletişim arayüzlerine https://www.universal-robots.com/products/ur-developer-s…
7 dk. 15 sn.
Uç Elemanı Yapılandırma: TCP, yönelme açısı, taşıma kapasitesi ve ağırlık merkezi
Bu eğitim, bir uç elemanı yapılandırmanın tüm adımlarında size yol gösterir
4 dk. 33 sn.

Universal Robots ile makine besleme yapmayı öğrenin
“Çevrimiçi Eğitim”de “e-Series Uygulama Eğitimi” dahilinde yeni makine besleme modülümüzü deneyin. B…
3 dk. 05 sn.

Elle yönlendir modunu kısıtlama ile programlamanızı geliştirin ve hızlandırın
Poliskop’un 5.8 sürümünden itibaren, elle yönlendir modunu kullanırken doğrusal eksenlerde döndürm…
2 dk. 40 sn.

“Başlatma Öncesİ Sekansı” İle program durdurulduktan sonra çarpışmaları önleyİn.
Hiç robotunuzun bir program durdurulduktan sonra yeniden başlatılırken çevresine çarptığı durumlar y…
4 dk. 59 sn.
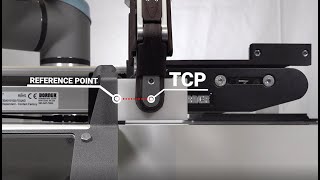
Sadece bİr tutucu kullanarak nesne boyutlarını ölçün
Yalnızca bir tutucu ve bir referans nokta kullanarak nesnelerin boyutlarını ölçmek için robotu nasıl…
5 dk. 57 sn.
Nesnelerİ algılamak İçİn kuvvet sensörü kullanma
Nesneleri algılamak için kuvvet sensörü kullanma (yön komutu/uç elemanı temas edene kadar hareket et…
3 dk. 54 sn.
Aktİf TCP’yİ bİr düzleme göre hİzalama
Bu video eğitimde aktif TCP’yi bir düzleme göre nasıl hizalayacağınızı öğreneceksiniz.
1 dk. 44 sn.
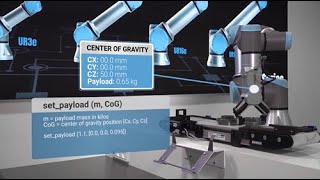
CB3: Program yürütülürken taşıma kapasİtesİ ve ağırlık merkezİnİ değiştİrme
Bu video eğitimde program yürütülürken taşıma kapasitesi ve ağırlık merkezini değiştirmeyi öğrenecek…
2 dk. 42 sn.

Güvenlik: uç elemanı yönelme açısını sınırlama
Robot kolu uç elemanının yönlenmesine izin verilen açıyı sınırlayarak uygulamanızı nasıl daha güvenl…
3 dk. 44 sn.

Güvenlik: eklemlerin açısal çalışma aralığını ve hızını sınırlama
Her bir robot eklemi için açısal çalışma aralığını ve hızını nasıl sınırlayacağınızı öğrenin
2 dk. 47 sn.

Güvenlik: Güvenlik düzlemleri oluşturun ve yapılandırın
Güvenlik düzlemlerini nasıl oluşturacağınızı ve yapılandıracağınızı öğrenin. Düzlemler, robotun norm…
2 dk. 00 sn.

1 Unboxing
2 dk. 10 sn.

2 Hardware Installation
3 dk. 16 sn.

3 Software Setup
0 dk. 41 sn.

4 Calibration
1 dk. 36 sn.