

Hücre yerleşimi ve ulaşılabilirlik testi
Paletleme istasyonunuz için hangi robota ihtiyacınız var? Paletleri ve robotu nereye yerleştiriyorsunuz? Robotun tüm palet konumlarına ulaşabilmesini nasıl sağlıyorsunuz?
Bu adımda, kendi paletleme istasyonunuzun ilk taslağını oluşturmanıza olanak sağlamak için hücre yerleşiminin en iyi uygulamalarını öğreneceksiniz.
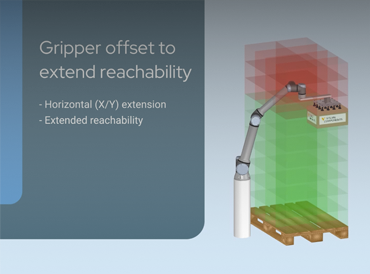
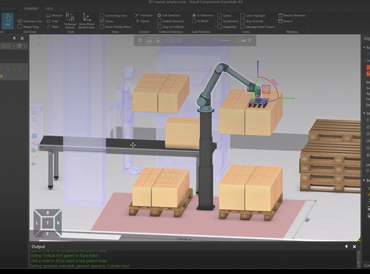
Ayrıca, robotun palet üzerindeki tüm katmanlara ve konumlara ulaşabildiğini ve robotun herhangi bir nesneyle çarpışmadığını doğrulamak için simülasyon aracında bir erişilebilirlik testinin nasıl gerçekleştirileceğini de öğreneceksiniz. Ulaşılabilirlik testi ayrıca ne tür bir tutucuya ihtiyacınız olduğunu ve 7. bir eksene ihtiyacınız olup olmadığını belirlemenize yardımcı olur.
- Paletleme istasyonunun ilk taslağını oluşturun
- Robotun tüm katmanlara ve konumlara ulaşabildiğini doğrulamak için ulaşılabilirlik testi yapın
İndirmeler
Modüller

 İzlenecek yol
İzlenecek yol
2.1. Hücre yerleşimi ile ilgili en iyi yöntemler
- Yerleşim tasarımı
- Palet konumlandırma
- Robot montajı
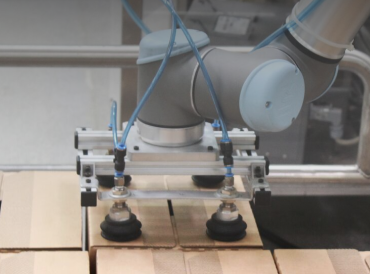
- Tutucu montajı
 İzlenecek yol
İzlenecek yol
2.2. Ulaşılabilirlik testi teorisi
- Tüm pozisyonların ulaşılabilirliği
- Çarpışmaları algılama
- 7. eksen ihtiyacı
 Uygulamalı
Uygulamalı
2.3. Müşteri Vakası - bölüm 2: hücre yerleşimi ve ulaşılabilirlik testi
- 3B hücre yerleşimi
- Ulaşılabilirlik testi
- Tutucu tasarımı ve montajı
İlgili bağlantılar

Hedef kontrolü
Bu safha için tüm hedeflere ulaşıp ulaşmadığınızı ve devam etmek için ihtiyacınız olan her şeye sahip olup olmadığınızı doğrulayın.
İleri aşama :
3. Tutucu seçimi ve testi
Paletleme istasyonunuzun yerleşimini tamamladığınızda ve bir ulaşılabilirlik testi gerçekleştirdiğinizde, bir sonraki adım, paletlediğiniz malzemelerle iyi çalışan bir tutucu seçmektir.
Bu aşamada, farklı kavrama sistemlerinin nasıl çalıştığını, hangi malzemeler için uygun olduklarını ve bir tutucuya yatırım yapmadan önce bir kavrama testi yapmanın neden önemli olduğunu öğreneceksiniz.