

Test di layout e raggiungibilità delle celle
Di quale robot hai bisogno per la stazione di pallettizzazione? E dove si posizionano i pallet e il robot? Come ci si assicura che il robot sia in grado di raggiungere tutte le posizioni dei pallet?
In questa fase, imparerai le migliori pratiche di layout delle celle per consentirti di creare una prima bozza della stazione di pallettizzazione.
Imparerai anche come eseguire un test di raggiungibilità in uno strumento di simulazione per verificare che il robot raggiunga tutti gli strati e le posizioni sul pallet e che il robot non entri in collisione con alcun oggetto. Il test di raggiungibilità ti aiuta anche a determinare il tipo di pinza di cui hai bisogno e se hai bisogno di un 7° asse.
- Crea la prima bozza della stazione di pallettizzazione
- Esegui il test di raggiungibilità per verificare che il robot possa raggiungere tutti gli strati e le posizioni
Download
Moduli

 Soluzione
Soluzione
2.1. Best practice per il layout delle celle
- Progettazione del layout
- Posizionamento pallet
- Supporto robot
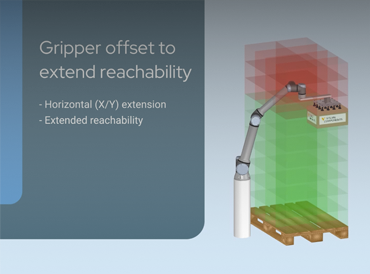
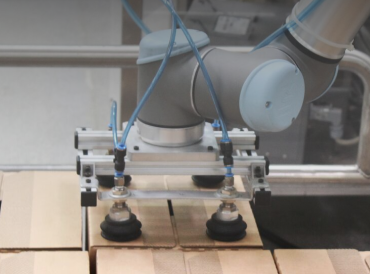
- Montaggio della pinza
 Soluzione
Soluzione
2.2. La teoria del test di raggiungibilità
- Raggiungibilità di tutte le posizioni
- Rilevamento delle collisioni
- Necessità del 7° asse
 Pratico
Pratico
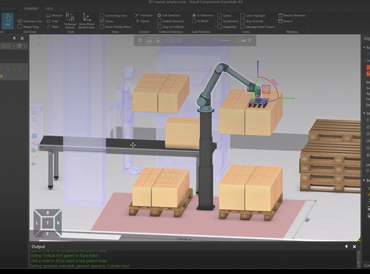
2.3. Caso cliente - parte 2: layout delle celle e test di raggiungibilità
- Layout delle celle 3D
- Test di raggiungibilità
- Design e montaggio della pinza
Link correlati

Controllo degli obiettivi
Verifica che siano stati raggiunti tutti gli obiettivi per questa fase e di avere tutto il necessario per procedere.
Fase successiva :
3. Selezione e test della pinza
Una volta finalizzato il layout della stazione di pallettizzazione ed eseguito un test di raggiungibilità, il passo successivo consiste nel selezionare una pinza che funzioni bene con i materiali pallettizzati.
In questa fase imparerai come funzionano i diversi sistemi di presa, per quali materiali sono adatti e perché è essenziale eseguire un test di presa prima di investire in una pinza.