Chiudi 
Choose your language

Esercitazioni video
Esplora esempi di programmazione passo-passo e tutorial pensati per aiutarti a muovere i primi passi con i prodotti Universal Robots.
Se vuoi imparare gli elementi essenziali della programmazione di un robot UR, dai un'occhiata alla sezione “Corsi on-line gratuiti ” in cui troverai corsi interattivi in e-learning per i robot UR20/30, e-Series e CB3.

1 Introduzione ai progetti in UR Studio
Scopri come creare, aprire, salvare e gestire progetti di programmazione di robot in UR Studio utili…
 1m 21s
1m 21s


2 Navigazione della stazione in UR Studio
Scopri come navigare e manipolare la vista stazione e gli oggetti robot in UR Studio utilizzando str…
1m 55s

3 Costruire la tua cella di lavoro con il catalogo UR Studio
Scopri come costruire rapidamente una cella di lavoro robotizzata in UR Studio aggiungendo component…
1m 47s

4 Rilevamento delle collisioni in UR Studio
Scopri come UR Studio evidenzia le collisioni nella configurazione della cella di lavoro del robot p…
0m 40s

5 Test della raggiungibilità del robot in UR Studio
Scopri come valutare la raggiungibilità del robot in UR Studio per scegliere il modello di robot ott…
1m 29s

6 Automatizzare il controllo del trasportatore con un sensore
Scopri come automatizzare il comportamento del trasportatore in UR Studio utilizzando sensori e conn…
1m 18s

7 Importazione di modelli 3D in UR Studio
Scopri come importare modelli 3D personalizzati in UR Studio come accessori, pezzi o strumenti di fi…
0m 48s

8 Importazione di pezzi personalizzati in UR Studio
Scopri come importare e configurare modelli 3D esterni come pezzi da lavorare in UR Studio, incluso…
1m 11s

9 Importazione e configurazione degli strumenti di fine braccio in UR Studio
Scopri come importare, posizionare e configurare strumenti end-of-arm personalizzati in UR Studio, c…
1m 24s

10 Installazione dei pacchetti UR Cap in UR Studio
Scopri come caricare, installare e gestire i pacchetti URCap in UR Studio, supportando le estensioni…
1m 03s

11 Insegna i punti direttamente con Shadow Programming
Scopri come insegnare rapidamente i movimenti del robot in UR Studio utilizzando la programmazione o…
1m 06s
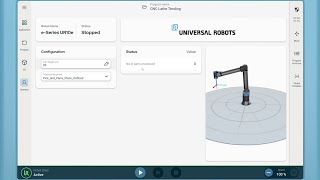
1 Introduzione alla GUI di PolyScope X
In questo modulo, vedrete la nuovissima interfaccia grafica di PolyScope X e dove trovare cosa.I pro…
2m 35s
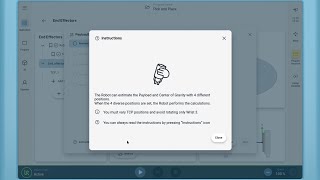
2 Configurazione di uno strumento tramite la procedura guidata
Scoprite come utilizzare le procedure guidate per configurare il carico utile, il centro di gravità…
3m 28s

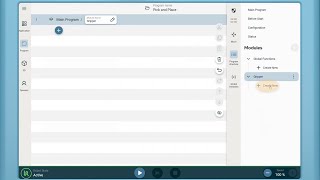
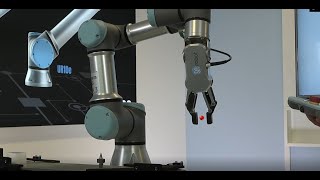
3 Come realizzare un semplice programma Pick and Place
In questo video mostriamo come realizzare un semplice programma Pick and Place utilizzando PolyScope…
3m 27s
4 Utilizzo di moduli e funzioni per aumentare la leggibilità e la riutilizzabilità del programma
Imparare a creare moduli e funzioni. Questo aumenterà la leggibilità del vostro programma e lo rende…
2m 49s
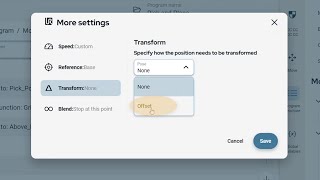
5 Trasformare le posizioni con gli offset per ridurre al minimo il numero di waypoint
Imparare a trasformare un waypoint utilizzando un offset definito dall'utente. In questo modo si rid…
2m 18s

6 Creare una griglia nell'applicazione
Imparate a utilizzare la funzione Griglia di PolyScope X, per ridurre al minimo il numero di waypoin…
2m 27s
7 Una semplice applicazione CNC che utilizza Griglia, Moduli e funzioni e Trasformazioni
In questo modulo le funzioni: Moduli e funzioni, Griglie e Trasformazione con offset vengono utilizz…
3m 21s
8 Caratteristiche dello schermo dell'operatore
Imparare a configurare lo schermo dell'operatore. Come rendere accessibili all'operatore le variabil…
3m 45s

9 Breve descrizione del modello di macchina del tornio CNC
Vedere una breve descrizione del modello per un'applicazione di tornio CNC. Insegnate i punti chiave…
1m 26s
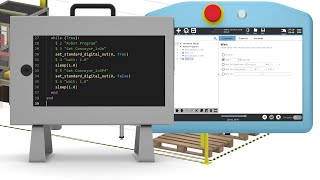
1 Introduzione a URScript
Un'introduzione a dove avete già utilizzato URScript. Dove trovare le funzioni più comuni e come è o…
7m 46s

2 Architettura di esecuzione del sistema
Panoramica dell'architettura di esecuzione del sistema URScript, per dare una spiegazione di “cosa v…
8m 54s
3 Conversione da nodo a URScript
Semplice spiegazione di come un programma può essere convertito in URScript. Questo fornisce una com…
3m 33s
4 Server Dashboard
Imparare a utilizzare una connessione TCP/IP Socket https://docs.universal-robots.com/tutorials/ursc…
4m 09s
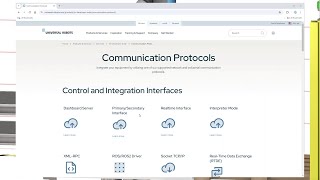
5 Interfacce e URScript remoto
Ottenete una panoramica delle diverse interfacce di comunicazione https://www.universal-robots.com/p…
7m 15s
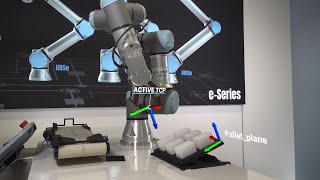
Configurazione dell’utensile: TCP, orientamento, carico utile e centro di gravità
Questo tutorial ti guida attraverso tutti i passi della configurazione di un utensile
4m 33s

Impara a realizzare l’asservimento macchina con Universal Robots
Prova il nostro nuovo modulo sull’asservimento macchina nel “Percorso Applicazioni e-Series” all’int…
3m 05s

Migliora e velocizza la tua programmazione con il freedrive vincolato
Dalla versione 5.8 di Polyscope, è ora possibile porre dei vincoli alla rotazione o al movimento neg…
2m 40s

Prevenire la collisione dopo l'arresto del programma con una "Sequenza prima dell’avvio"
Hai mai visto il tuo robot entrare in collisione con l'ambiente circostante quando viene riavviato a…
4m 59s
Misura le dimensioni dell'oggetto usando solo una pinza
Scopri come programmare il robot per misurare le dimensioni degli oggetti usando solo una pinza e un…
5m 57s
Come utilizzare il sensore di forza per rilevare oggetti
Come utilizzare il sensore di forza per rilevare oggetti (comando di direzione/spostamento fino al c…
3m 54s
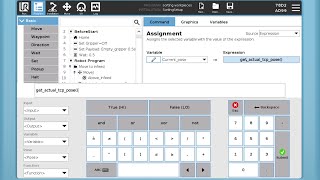
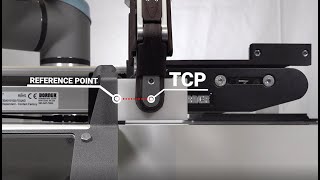
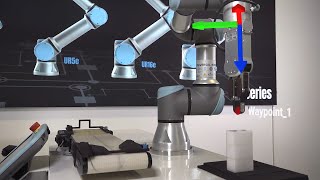
Come allineare il TCP attivo a una funzionalità
In questa esercitazione video imparerai come allineare il TCP attivo a una funzionalità.
1m 44s
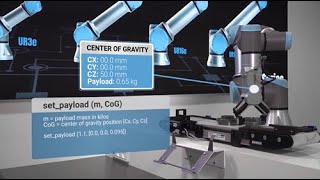
CB3: Come modificare il carico utile e il baricentro durante l'esecuzione del programma
In questa video esercitazione imparerai come modificare il carico utile e il baricentro durante l'es…
2m 42s

Misura di sicurezza: come limitare l'angolo di direzione dell’utensile
Imparate a rendere più sicura la vostra applicazione limitando l'angolo entro il quale può essere di…
3m 44s

Sicurezza: impostazione dei limiti e della velocità delle articolazioni
Impara come fare a ridurre l'ampiezza e la velocità del movimento dell'articolazione di qualsiasi ro…
2m 47s

Sicurezza: creare e configurare i piani di sicurezza
Imparare come creare e configurare i piani di sicurezza. I piani possono impedire al robot di muover…
2m 00s

1 Unboxing
2m 10s

2 Hardware Installation
3m 16s

3 Software Setup
0m 41s

4 Calibration
1m 36s