Chiudi 
Choose your language

Percorso Base e-Series
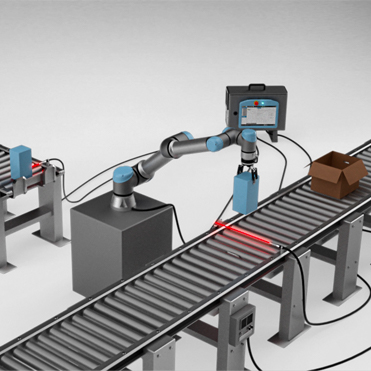
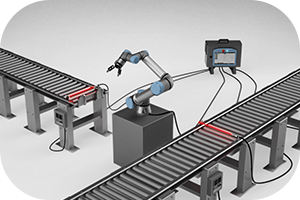
Il Percorso Base tratta tutti i concetti essenziali, la terminologia e i comandi di programmazione necessari per utilizzare un robot UR. Gli 8 moduli sono una simulazione step-by-step dell’impostazione e programmazione di un’applicazione di prelievo e posizionamento completa.
Browser e impostazioni consigliati. Per visualizzare i moduli dei Corsi on-line si consiglia di utilizzare l'ultima versione di Microsoft Edge o Google Chrome. JavaScript deve essere abilitato.
Moduli
1. Diamo un'occhiata: Il robot in breve
Questo modulo offre una breve introduzione sui robot, interfaccia utente, I/O e funzioni.
 7m
7m

2. Preparare un’attività del robot
In questo modulo preparerete il robot per un’attività di prelievo e posizionamento collegando un att…
6m

3. Impostare un utensile
Imparate come trovare e configurare il tool center point, come impostare l’orientamento degli utensi…
17m
4. Creare un programma
In questo modulo apprenderete i diversi tipi di movimento del robot e programmerete tutti i moviment…
12m
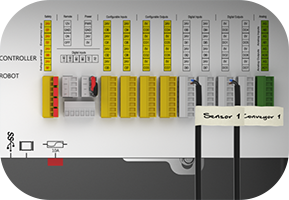
5. Interazione con dispositivi esterni
In questo modulo apprenderete come utilizzare la pinza, come interagire con i sensori e come modific…
11m
6. Controllo dei nastri trasportatori
In questo modulo apprenderete come controllare i trasportatori utilizzando un thread.
10m
7. Impostazioni di sicurezza
In questo modulo apprenderete come applicare diverse impostazioni di sicurezza all’applicazione di p…
15m
8. Ottimizzazione
In questo modulo apprenderete come ottimizzare l’applicazione di prelievo e posizionamento aggiungen…
6m