Zavřít 
Choose your language

Video návody
Prozkoumejte podrobné příklady programování a výukové programy, které vám pomohou začít s produkty Universal Robots.
Pokud se chcete naučit základům programování robota UR, podívejte se do sekce online školení zdarma, kde najdete interaktivní e-learning pro roboty řady UR20/30, e-Series i CB3.

1 Začínáme s projekty v UR Studiu
Naučte se vytvářet, otevírat, ukládat a spravovat projekty programování robotů v UR Studiu pomocí ša…
 1m 21s
1m 21s


2 Navigace ve stanici ve studiu UR
Zjistěte, jak se pohybovat a manipulovat se zobrazením stanice a objekty robota v UR Studiu pomocí n…
1m 55s

3 Budujte svou pracovní buňku s katalogem UR Studio
Naučte se rychle postavit robotickou pracovní buňku v UR Studiu přidáním komponentů, jako jsou stoja…
1m 47s

4 Detekce kolize ve studiu UR
Prozkoumejte, jak UR Studio zvýrazňuje kolize v nastavení pracovní buňky robota, abyste zajistili be…
0m 40s

5 Testování dosažitelnosti robota ve studiu UR
Zjistěte, jak vyhodnotit dosažitelnost robota v UR Studiu a vybrat optimální model robota pro uspořá…
1m 29s

6 Automatizace řízení dopravníku pomocí senzoru
Podívejte se, jak automatizovat chování dopravníku v UR Studiu pomocí senzorů a signálových připojen…
1m 18s

7 Import 3D modelů do UR Studia
Naučte se importovat vlastní 3D modely do UR Studia jako příslušenství, obrobky nebo nástroje na kon…
0m 48s

8 Import vlastních obrobků do UR Studia
Naučte se importovat a konfigurovat externí 3D modely jako obrobky v UR Studiu, včetně škálování a p…
1m 11s

9 Import a konfigurace nástrojů End-of-Arm v UR Studiu
Zjistěte, jak importovat, umístit a konfigurovat vlastní nástroje na konci ramene v UR Studiu, včetn…
1m 24s

10 Instalace balíčků UR Cap v UR Studiu
Naučte se nahrávat, instalovat a spravovat balíčky URCap v UR Studiu, které podporují rozšíření fron…
1m 03s

11 Vyučujte body přímo pomocí stínového programování
Zjistěte, jak rychle učit pohyby robota v UR Studiu pomocí programování stínů, aniž byste robota mus…
1m 06s
1 Úvod do grafického rozhraní PolyScope X
V tomto modulu se seznámíte se zcela novým grafickým uživatelským rozhraním programu PolyScope X a d…
2m 35s
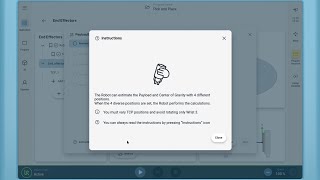
2 Konfigurace nástroje pomocí průvodce
Podívejte se, jak pomocí průvodců konfigurovat užitečné zatížení, těžiště (CoG), středový bod nástro…
3m 28s

3 Jak vytvořit jednoduchý program Pick and Place
V tomto videu si ukážeme, jak vytvořit jednoduchý program Pick and Place pomocí programu PolyScope X…
3m 27s
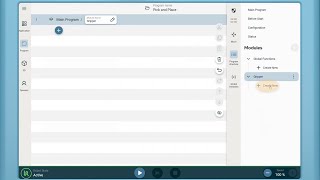
4 Použití modulů a funkcí ke zvýšení čitelnosti a opakované použitelnosti programu
Naučte se vytvářet moduly a funkce. Zvýšíte tím čitelnost svého programu a usnadníte jeho opakované…
2m 49s
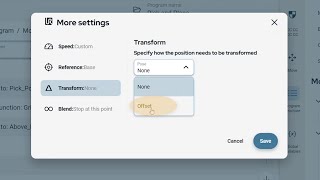
5 Transformace polohy pomocí Offsetu pro minimalizaci počtu bodů trasy
Naučte se transformovat bod trasy pomocí posunu definovaného uživatelem. Tím se minimalizuje počet t…
2m 18s

6 Vytvořte v aplikaci mřížku
Zjistěte, jak používat funkci Mřížka v softwaru PolyScope X, abyste minimalizovali počet potřebných…
2m 27s
7 Jednoduchá CNC aplikace využívající mřížku, moduly, funkce a transformace
Funkce tohoto modulu: Moduly a funkce, mřížky a transformace s posunem se použité k vytvoření jednod…
3m 21s
8 Funkce obrazovky Operátor
Zjistěte, jak nastavit obrazovku operátora. Jak zpřístupnit vstupní proměnné a volby operátorovi a j…
3m 45s

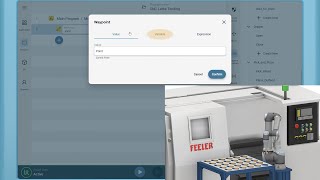
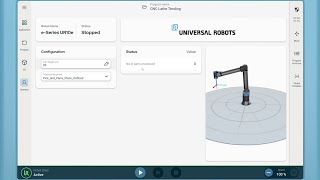
9 Krátký průchod šablonou CNC soustruhu
Podívejte se na krátkou ukázku šablony pro aplikaci CNC soustruhu. Naučte klíčové body trasy, Nakonf…
1m 26s
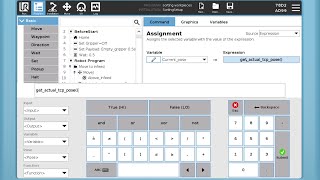
1 Úvod do jazyka URScript
Získejte úvodní informace o tom, kde jste již použili jazyk URScript. Kde najdete nejběžnější funkce…
7m 46s

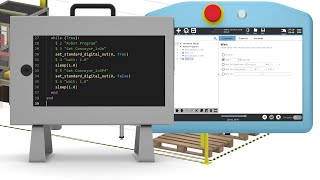
2 Architektura provádění systému
Přehled architektury provádění systému URScript, vysvětlení „co kam patří“ https://www.universal-rob…
8m 54s
3 Převod Node do jazyka URScript
Jednoduchý návod, jak lze program převést do jazyka URScript. Získáte tak základní představu o tom,…
3m 33s
4 Dashboard Server
Naučte se používat připojení TCP/IP Socket https://docs.universal-robots.com/tutorials/urscript-tuto…
4m 09s
5 Příkazy URScript prováděné vzdáleně přes Interfaces
Získejte přehled o různých komunikačních rozhraních https://www.universal-robots.com/products/ur-dev…
7m 15s
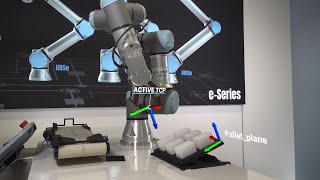
Konfigurace nástroje: TCP, orientace, náklad a těžiště
Tento výukový program Vás provede celým postupem konfigurace nástroje, resp. koncového efektoru
4m 33s

Naučte se obsluhu strojů s Universal Robots
Vyzkoušejte náš nový modul obsluhy strojů v „Aplikační lekci e-Series“ v online školení. Zde si také…
3m 05s

Zlepšete a zrychlete své programování s omezeným volným pohonem
Od verze Polyscope 5.8 je nyní možné omezit rotaci nebo pohyb v lineárních osách s použitím volného…
2m 40s

Zabraňte kolizi po zastavení programu pomocí funkce „Before Start Sequence“
Zažili jste někdy srážku vašeho robota s okolím při jeho restartování po ukončení programu? Tento ná…
4m 59s
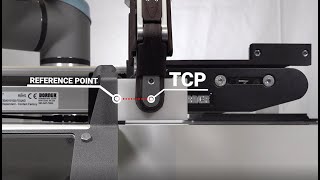
Změřte rozměry objektu pouze pomocí chapadla
Naučte se, jak můžete naprogramovat robota, aby měřil rozměry objektů pouze pomocí chapadla a vztažn…
5m 57s
Jak používat snímač síly k detekci objektů
Jak používat snímač síly k detekci objektů (příkaz směru/pohybu až do kontaktu s nástrojem)
3m 54s
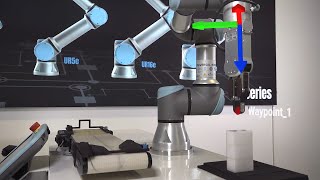
Jak zarovnat aktivní TCP vůči prvku
V tomto videu se naučíte, jak zarovnat aktivní TCP vůči prvku.
1m 44s
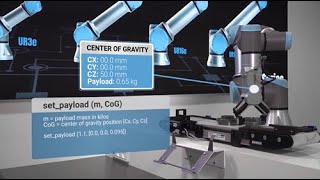
CB3: Jak změnit užitečné zatížení a těžiště během provádění programu
V tomto videu se naučíte, jak během provádění programu měnit užitečné zatížení a těžiště.
2m 42s

Bezpečnost: omezení úhlu směru nástroje
Podívejte se, jak bezpečnějí realizovat aplikace s omezením úhlu, do kterého může nástroj pro roboti…
3m 44s

Bezpečnost: nastavení limitů a rychlosti kloubů
Naučte se, jak omezit rozsah pohybu a rychlost pro každý jednotlivý robotický kloub.
2m 47s

Bezpečnost: vytvoření a nastavení bezpečnostních rovin
Naučte se, jak vytvářet a nastavovat bezpečnostní roviny. Tyto roviny zabrání robotu, aby je v běžné…
2m 00s

1 Unboxing
2m 10s

2 Hardware Installation
3m 16s

3 Software Setup
0m 41s

4 Calibration
1m 36s