Zavřít 
Choose your language

Online školení UR20/30
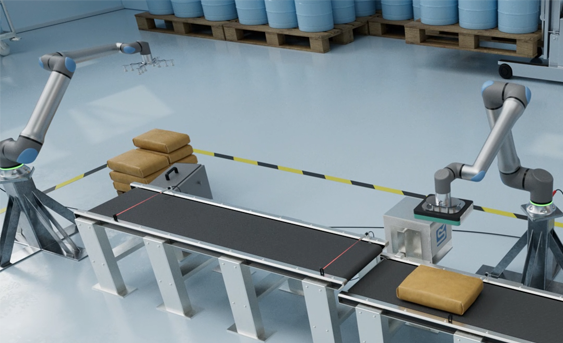
Vstupte do světa automatizace a připojte se k supervizorovi Bryanovi v tovární hale, kde v rámci tohoto intenzivního školení získáte skutečné praktické dovednosti. Vyzkoušíte si mnoho různých úkolů z reálného života, protože Bryan vás provede každým krokem nastavení a programování robota UR20.
Pokud s Universal Robots teprve začínáte, jste tu správně!
POZNÁMKA: Obsah je k dispozici pouze v angličtině.
Doporučený prohlížeč a nastavení. K zobrazení modulů e-learningu doporučujeme používat nejnovější verzi prohlížeče Microsoft Edge nebo Google. Je nutno povolit JavaScript.
Moduly

1. Přehled hardwaru a nastavení
V prvním modulu začnete přehledem hardwaru a softwaru robota. Poté robota připravíte na provedení úk…
 15m
15m


2. Konfigurace nástroje
Ve druhém modulu se naučíte základní koncepty a postupy související s konfigurací uchopovače, jehož…
20m
3. Pohyb a typy pohybu
Ve třetím modulu se dozvíte o různých typech pohybu robota a o tom, jak robota přemístit pomocí obra…
8m

4. Vytvoření programu
Ve čtvrtém modulu použijete to, co jste se naučili o pohybu a typech pohybu ve třetím modulu, abyste…
17m

5. Odběr a pokládání
V pátém modulu přidáte příkazy pro zpracování vstupu ze senzoru, ovládání uchopovače a změnu nákladu…
11m

6. Komunikace mezi roboty
V tomto modulu se dozvíte, jak nastavit komunikaci mezi dvěma roboty, aby bylo možné provádět synchr…
8m

7. Ovládání dopravníku
V sedmém modulu se dozvíte, jak řídit dopravník pomocí podmíněných příkazů v kombinaci se vstupními…
11m

8. Ovládání síly
Tento modul se zaměřuje na to, aby vás naučil, jak přesně aplikovat štítky pomocí schopností robotu…
12m

9. Paletizace
V tomto modulu se naučíte, jak používat paletizační šablonu softwaru k nakládání sáčků na paletu.
10m

10. Nastavení pro výrobu
V tomto modulu připravíte robot na výrobu připojením ovládacího panelu a konfigurací robotu pro dálk…
10m

Blahopřejeme!
Dokončili jste všechny moduly v této online lekce. Proč se nepustit do další lekce nebo se nezúčastnit našeho školení?
Zjistěte více účastí na jednom z našich školeníPřejít na přehled online školení zdarma