

รูปแบบเซลล์และการทดสอบการเข้าถึง
คุณต้องการหุ่นยนต์แบบใดสําหรับสถานีจัดวางพาเลทของคุณ แล้วคุณจะวางพาเลทและหุ่นยนต์ไว้ที่ใด คุณจะแน่ใจได้อย่างไรว่าหุ่นยนต์สามารถเข้าถึงตําแหน่งพาเลททั้งหมดได้
ในขั้นตอนนี้ คุณจะได้เรียนรู้แนวทางปฏิบัติที่ดีที่สุดของรูปแบบเซลล์ เพื่อให้คุณสามารถสร้างแบบร่างแรกสำหรับสถานีจัดวางพาเลทของคุณเองได้
นอกจากนี้ คุณยังจะได้เรียนรู้วิธีทําการทดสอบความสามารถในการเข้าถึงเครื่องมือจําลองเพื่อตรวจสอบว่าหุ่นยนต์สามารถเข้าถึงทุกชั้นและตําแหน่งบนพาเลทได้ และโดยที่หุ่นยนต์ไม่ชนกับวัตถุใด ๆ การทดสอบความสามารถในการเข้าถึงยังช่วยให้คุณระบุได้ว่าคุณต้องการอุปกรณ์มือจับชนิดใด และคุณต้องการแกนที่ 7 หรือไม่
- สร้างร่างแรกสำหรับสถานีการจัดวางพาเลท
- ทําการทดสอบความสามารถในการเข้าถึงเพื่อตรวจสอบว่าหุ่นยนต์สามารถเข้าถึงทุกชั้นและตําแหน่งได้
ดาวน์โหลด
หน่วยการเรียน

 บทสรุป
บทสรุป
2.1. แนวทางปฏิบัติที่ดีที่สุดของรูปแบบเซลล์
- การออกแบบรูปแบบ
- การวางตําแหน่งพาเลท
- การติดตั้งหุ่นยนต์
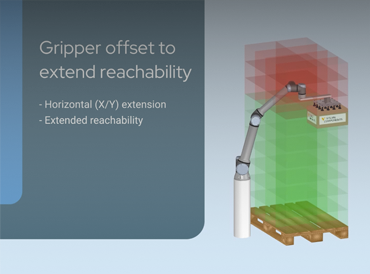
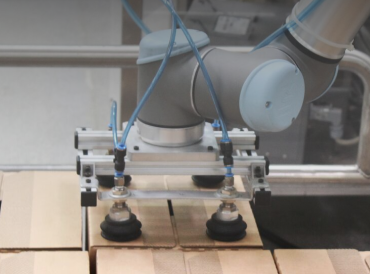
- การติดตั้งอุปกรณ์มือจับ
 บทสรุป
บทสรุป
2.2. ทฤษฎีการทดสอบความสามารถในการเข้าถึง
- ความสามารถในการเข้าถึงทุกตําแหน่ง
- การตรวจจับการชนปะทะกัน
- ความจำเป็นที่ต้องใช้แกนที่ 7
 ลงมือปฏิบัติจริง
ลงมือปฏิบัติจริง
2.3. กรณีลูกค้า - ส่วนที่ 2: รูปแบบเซลล์และการทดสอบความสามารถในการเข้าถึง
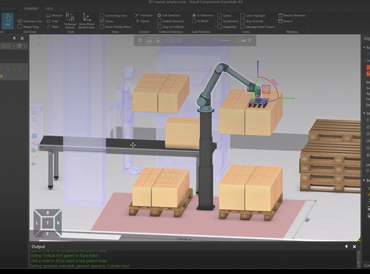
- รูปแบบเซลล์ 3 มิติ
- การทดสอบความสามารถในการเข้าถึง
- การออกแบบและการติดตั้งอุปกรณ์มือจับ
ลิงก์ต่าง ๆ ที่เกี่ยวข้อง

ตรวจสอบเป้าหมาย
ตรวจสอบว่าคุณบรรลุเป้าหมายทั้งหมดสําหรับขั้นตอนนี้หรือไม่ และคุณมีทุกสิ่งที่จําเป็นในการดําเนินการต่อหรือไม่
ขั้นตอนต่อไป :
3. การเลือกและทดสอบอุปกรณ์มือจับ
เมื่อคุณสรุปรูปแบบของสถานีจัดวางพาเลทของคุณและทําการทดสอบความสามารถในการเข้าถึงแล้ว ขั้นตอนต่อไปคือการเลือกอุปกรณ์มือจับที่ทํางานได้ดีกับวัสดุที่คุณจัดวางบนพาเลท
ในขั้นตอนนี้ คุณจะได้เรียนรู้ว่าระบบการจับยึดที่แตกต่างกันทํางานอย่างไร วัสดุใดที่มีความเหมาะสม และเหตุใดการทดสอบการจับยึดก่อนการดำเนินการในอุปกรณ์มือจับจึงเป็นสิ่งสําคัญ