ปิด 
Choose your language

วิดีโอแนะนำ
สำรวจตัวอย่างการเขียนโปรแกรมแบบทีละขั้นตอนและแบบฝึกสอนที่ออกแบบมาเพื่อช่วยให้คุณเริ่มต้นใช้งานผลิตภัณฑ์ Universal Robots
หากต้องการเรียนรู้รายละเอียดที่สำคัญในการตั้งโปรแกรมการทำงานสำหรับหุ่นยนต์จาก UR ให้เข้าไปที่หัวข้อ บทเรียนอิเล็กทรอนิกส์ฟรี และเข้าสู่บทเรียนอิเล็กทรอนิกส์แบบอินเทอร์แอคทีฟทั้งสำหรับหุ่นยนต์ e-Series และ CB3

1 การเริ่มต้นใช้งานโปรเจ็กต์ใน UR Studio
เรียนรู้วิธีการสร้าง เปิด บันทึก และจัดการโครงการการเขียนโปรแกรมหุ่นยนต์ใน UR Studio โดยใช้เทมเพลตหร…
 1 นาที 21 วินาที
1 นาที 21 วินาที


2 การนำทางสถานีใน UR Studio
ค้นพบวิธีการนำทางและจัดการมุมมองสถานีและวัตถุหุ่นยนต์ใน UR Studio โดยใช้เครื่องมือแพน โคจร เคลื่อนย้…
1 นาที 55 วินาที

3 การสร้างเซลล์การทำงานของคุณด้วยแค็ตตาล็อก UR Studio
เรียนรู้วิธีสร้างเซลล์ทำงานของหุ่นยนต์อย่างรวดเร็วใน UR Studio ด้วยการเพิ่มส่วนประกอบต่างๆ เช่น ขาตั…
1 นาที 47 วินาที

4 การตรวจจับการชนกันใน UR Studio
สำรวจว่า UR Studio เน้นการชนกันในการตั้งค่าเซลล์การทำงานของหุ่นยนต์ของคุณอย่างไร เพื่อช่วยให้แน่ใจว่…
0 นาที 40 วินาที

5 การทดสอบความสามารถในการเข้าถึงของหุ่นยนต์ใน UR Studio
เรียนรู้วิธีประเมินความสามารถในการเข้าถึงของหุ่นยนต์ใน UR Studio เพื่อเลือกโมเดลหุ่นยนต์ที่เหมาะสมที…
1 นาที 29 วินาที

6 การควบคุมสายพานลำเลียงอัตโนมัติด้วยเซ็นเซอร์
ดูวิธีการทำให้พฤติกรรมของสายพานลำเลียงเป็นแบบอัตโนมัติใน UR Studio โดยใช้เซ็นเซอร์และการเชื่อมต่อสัญ…
1 นาที 18 วินาที

7 การนำเข้าโมเดล 3 มิติเข้าสู่ UR Studio
เรียนรู้วิธีนำเข้าโมเดล 3 มิติแบบกำหนดเองไปยัง UR Studio ในรูปแบบอุปกรณ์เสริม ชิ้นงาน หรือเครื่องมือ…
0 นาที 48 วินาที

8 การนำเข้าชิ้นงานที่กำหนดเองเข้าสู่ UR Studio
เรียนรู้วิธีการนำเข้าและกำหนดค่าโมเดล 3 มิติภายนอกเป็นชิ้นงานใน UR Studio รวมถึงการปรับขนาดและตำแหน่…
1 นาที 11 วินาที

9 การนำเข้าและกำหนดค่าเครื่องมือ End-of-Arm ใน UR Studio
เรียนรู้วิธีการนำเข้า วางตำแหน่ง และกำหนดค่าเครื่องมือปลายแขนแบบกำหนดเองใน UR Studio รวมถึงการปรับกา…
1 นาที 24 วินาที

10 การติดตั้งแพ็กเกจ UR Cap ใน UR Studio
เรียนรู้วิธีการอัปโหลด ติดตั้ง และจัดการแพ็คเกจ URCap ใน UR Studio รองรับส่วนขยายส่วนหน้าเพื่อการทำง…
1 นาที 03 วินาที

11 สอนจุดต่างๆ โดยตรงด้วย Shadow Programming
ค้นพบวิธีการสอนการเคลื่อนไหวของหุ่นยนต์อย่างรวดเร็วใน UR Studio โดยใช้การเขียนโปรแกรมเงา โดยไม่ต้องส…
1 นาที 06 วินาที
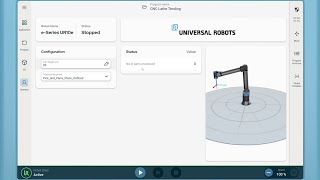
1 ข้อมูลเบื้องต้นเกี่ยวกับ GUI ของ PolyScope X
ในโมดูลนี้ คุณจะเห็น GUI ใหม่ล่าสุดของ PolyScope X และจะหาได้จากที่ไหน โมดูลถัดไปจะเจาะลึกลงไปในฟังก…
2 นาที 35 วินาที
2 การกำหนดค่าเครื่องมือโดยใช้วิซาร์ด
ดูวิธีใช้วิซาร์ดเพื่อกำหนดค่าเพย์โหลด จุดศูนย์ถ่วง (CoG) จุดศูนย์กลางเครื่องมือ (TCP) และการวางแนวขอ…
3 นาที 28 วินาที

3 วิธีสร้างโปรแกรม Pick and Place แบบง่ายๆ
ในวิดีโอนี้ เราจะแสดงวิธีสร้างโปรแกรม Pick and Place อย่างง่ายโดยใช้ PolyScope X
3 นาที 27 วินาที
4 การใช้โมดูลและฟังก์ชันเพื่อเพิ่มความสามารถในการอ่านและการนำโปรแกรมของคุณกลับมาใช้ใหม่ได้
เรียนรู้วิธีการสร้างโมดูลและฟังก์ชัน ซึ่งจะช่วยเพิ่มความสามารถในการอ่านโปรแกรมของคุณ และทำให้ง่ายต่อ…
2 นาที 49 วินาที
5 เปลี่ยนตำแหน่งด้วย Offsets เพื่อลดจำนวนจุดอ้างอิง
เรียนรู้วิธีการแปลงเวย์พอยท์โดยใช้ออฟเซ็ตที่ผู้ใช้กำหนด วิธีนี้จะช่วยลดจำนวนเวย์พอยท์ที่จำเป็นในโปรแ…
2 นาที 18 วินาที

6 สร้างตารางในแอปพลิเคชันของคุณ
เรียนรู้วิธีใช้คุณสมบัติ Grid ใน PolyScope X เพื่อลดจำนวนจุดที่ต้องการให้เหลือน้อยที่สุด (มีลักษณะคล…
2 นาที 27 วินาที
7 แอปพลิเคชัน CNC อย่างง่ายโดยใช้กริด โมดูลและฟังก์ชัน และการแปลง
ในโมดูลนี้ คุณสมบัติ: โมดูลและฟังก์ชัน กริด และการแปลงพร้อมออฟเซ็ตจะใช้เพื่อสร้างแอปพลิเคชัน CNC อย่…
3 นาที 21 วินาที
8 คุณสมบัติของหน้าจอผู้ปฏิบัติงาน
เรียนรู้วิธีตั้งค่าหน้าจอผู้ปฏิบัติงาน วิธีทำให้ผู้ปฏิบัติงานสามารถเข้าถึงตัวแปรอินพุตและการเลือกได้…
3 นาที 45 วินาที

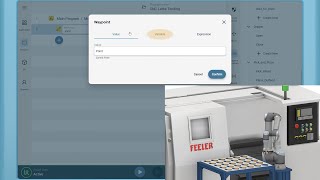
9 บทสรุปสั้นๆ ของเทมเพลตเครื่องกลึง CNC
ดูเทมเพลตสั้นๆ สำหรับแอปพลิเคชันเครื่องกลึง CNC สอนจุดสำคัญ กำหนดค่าการเชื่อมต่อเครื่อง CNC กับ I/O…
1 นาที 26 วินาที
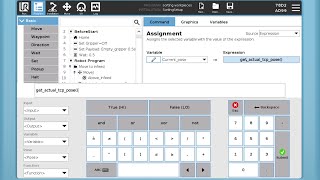
1 ความรู้เบื้องต้นเกี่ยวกับ URScript
รับข้อมูลเบื้องต้นเกี่ยวกับส่วนที่คุณใช้ URScript อยู่แล้ว จะค้นหาฟังก์ชันทั่วไปได้ที่ไหน และวิธีเรี…
7 นาที 46 วินาที

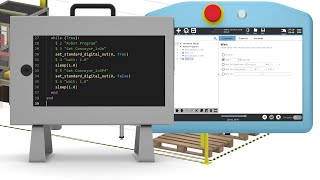
2 สถาปัตยกรรมการดำเนินการของระบบ
ภาพรวมของสถาปัตยกรรมการดำเนินการระบบของ URScript เพื่อให้คำอธิบาย "เกิดอะไรขึ้น" https://www.univers…
8 นาที 54 วินาที
3 โหนดเป็นการแปลง URScript
คำแนะนำง่ายๆ เกี่ยวกับวิธีแปลงโปรแกรมเป็น URScript ข้อมูลนี้ให้ความเข้าใจพื้นฐานเกี่ยวกับวิธีเริ่มกา…
3 นาที 33 วินาที
4 เซิร์ฟเวอร์แดชบอร์ด
เรียนรู้วิธีใช้การเชื่อมต่อซ็อกเก็ต TCP/IP https://docs.universal-robots.com/tutorials/urscript-tuto…
4 นาที 09 วินาที
5 อินเทอร์เฟซและ URScript ระยะไกล
ดูภาพรวมของอินเทอร์เฟซการสื่อสารต่างๆ https://www.universal-robots.com/products/ur-developer-suite/c…
7 นาที 15 วินาที
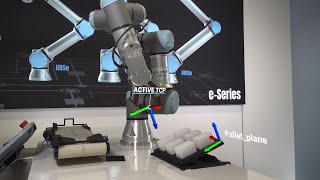
การกำหนดโครงร่างการทำงานของเครื่องมือ: TCP, ทิศทาง, น้ำหนักบรรุทกและจุดศูนย์ถ่วง
ชุดข้อมูลสาธิตนี้จะแนะนำขั้นตอนทั้งหมดในการกำหนดโครงร่างการทำงานของเครื่องมือ/อุปกรณ์ประกอบปลายแขน
4 นาที 33 วินาที

เรียนรู้วิธีจับชิ้นงานกลึงไปกับ Universal Robots
ศึกษาหน่วยการเรียนด้านการจับชิ้นงานกลึงใหม่ของเราได้จาก “e-Series Application Track” ใน “Online Trai…
3 นาที 05 วินาที

ปรับปรุงและเพิ่มความเร็วในการตั้งโปรแกรมการทำงานของคุณด้วยระบบฟรีไดร์ฟภายใต้ข้อจำกัด
นับตั้งแต่ Polyscope เวอร์ชั่น 5.8 คุณสามารถกำหนดข้อจำกัดในการหมุนหรือเคลื่อนที่ของชุดแกนเชิงเส้นขณะ…
2 นาที 40 วินาที

ป้องกันการกระแทกหลังจากสิ้นสุดโปรแกรมการทำงานด้วยชุดคำสั่ง “Before Start Sequence”
คุณเคยพบปัญหาหุ่นยนต์กระแทกกับวัตถุแวดล้อมขณะเริ่มการทำงานใหม่หลังจากสิ้นสุดโปรแกรมการทำงานก่อนหน้าห…
4 นาที 59 วินาที
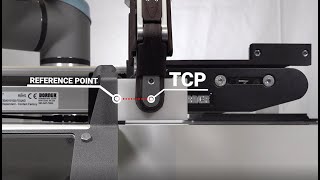
วัดขนาดของวัตถุโดยใช้อุปกรณ์มือจับเพียงอย่างเดียว
เรียนรู้วิธีการตั้งโปรแกรมการทำงานของหุ่นยนต์เพื่อวัดขนาดของวัตถุโดยใช้เฉพาะอุปกรณ์มือจับและจุดอ้างอ…
5 นาที 57 วินาที
การใช้เซ็นเซอร์วัดแรงเพื่อตรวจจับวัตถุ
การใช้เซ็นเซอร์วัดแรงเพื่อตรวจจับวัตถุ (คำสั่งควบคุมทิศทาง/การเคลื่อนที่จนถึงจุดสัมผัสเครื่องมือ)
3 นาที 54 วินาที
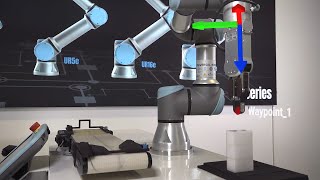
การกำหนดแนว TCP ใช้งานเข้ากับส่วนการทำงาน
ในวิดีโอแนะนำนี้ คุณจะได้เรียนรู้วิธีการกำหนดแนว TCP ใช้งานเข้ากับส่วนการทำงาน
1 นาที 44 วินาที
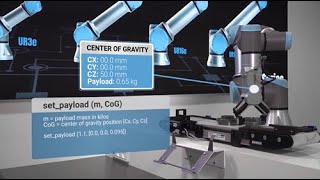
CB3: การแก้ไขเพย์โหลดและจุดศูนย์ถ่วงระหว่างการทำงานของโปรแกรมการทำงาน
วิดีโอแนะนำชุดนี้จะแนะนำคุณเกี่ยวกับการปรับเพย์โหลดและจุดศูนย์ถ่วงระหว่างการทำงานของโปรแกรมการทำงาน
2 นาที 42 วินาที

ความปลอดภัย: การจำกัดมุมทิศทางของเครื่องมือ
เรียนรู้วิธีการดูแลการใช้งานของคุณให้ปลอดภัยโดยการจำกัดมุมที่อุปกรณ์ประกอบปลายแขนสามารถเคลื่อนได้
3 นาที 44 วินาที

ความปลอดภัย: กำหนดแนวข้อต่อและความเร็ว
เรียนรู้วิธีการจำกัดช่วงการเคลื่อนที่และความเร็วสำหรับข้อต่อหุ่นยนต์แต่ละส่วน
2 นาที 47 วินาที

ความปลอดภัย: สร้างและกำหนดโครงร่างระนาบที่ปลอดภัย
เรียนรู้วิธีการสร้างและกำหนดโครงร่างระนาบที่ปลอดภัย แนวระนาบจะช่วยป้องกันไม่ให้หุ่นยนต์เคลื่อนที่เกิ…
2 นาที 47 วินาที

1 Unboxing
2 นาที 10 วินาที

2 Hardware Installation
3 นาที 16 วินาที

3 Software Setup
0 นาที 41 วินาที

4 Calibration
1 นาที 36 วินาที