ปิด 
Choose your language

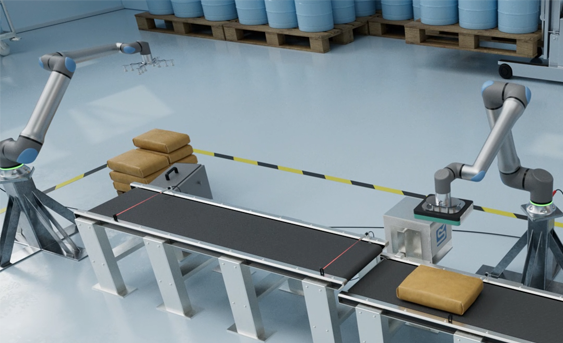
บทเรียนอิเล็กทรอนิกส์ UR20/30
ก้าวสู่โลกแห่งระบบอัตโนมัติและเรียนรู้ทักษะการปฏิบัติจริงในประสบการณ์การฝึกอบรมที่ได้ลงมือทำจริงไปกับไบรอัน หัวหน้างานในส่วนโรงงาน ทดลองใช้ทำงานจริงด้านต่างๆ ในระหว่างที่ไบรอันจะคอยแนะนำคุณตลอดทุกขั้นตอนในการตั้งค่าและตั้งโปรแกรมการทำงานของหุ่นยนต์ UR20
ถ้าหากคุณเพิ่งรู้จัก Universal Robots เราขอแนะนำให้คุณเริ่มที่ตรงนี้เลย!
ซอฟต์แวร์: PolyScope 5
หมายเหตุ: เนื้อหาเป็นภาษาอังกฤษเท่านั้น
บราวเซอร์และการตั้งค่าที่แนะนำ เราขอแนะนำให้ใช้ Microsoft Edge หรือ Google Chrome เวอร์ชันล่าสุดเพื่อดูโมดูลอีเลิร์นนิง ต้องเปิดใช้งาน JavaScript
หน่วยการเรียน

1. ภาพรวมฮาร์ดแวร์และการตั้งค่า
ในโมดูลแรก คุณจะเริ่มต้นด้วยการทำความรู้จักภาพรวมเกี่ยวกับฮาร์ดแวร์และซอฟต์แวร์ของหุ่นยนต์ จากนั้นจึ…
 15นาที
15นาที


2. การกำหนดค่าเครื่องมือ
ในโมดูลที่ 2 คุณจะได้เรียนรู้แนวคิดและขั้นตอนสำคัญที่เกี่ยวข้องกับการกำหนดค่าอุปกรณ์มือจับที่คุณติดต…
20นาที
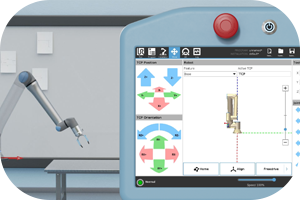
3. การเคลื่อนที่และประเภทการเคลื่อนไหว
ในโมดูลที่ 3 คุณจะได้เรียนรู้เกี่ยวกับการเคลื่อนไหวประเภทต่างๆ ของหุ่นยนต์ รวมถึงวิธีการเคลื่อนย้ายห…
8นาที

4. การสร้างโปรแกรมการทำงาน
ในโมดูลที่ 4 คุณจะได้ใช้สิ่งที่เรียนรู้เกี่ยวกับการเคลื่อนที่และประเภทการเคลื่อนไหวในโมดูลที่ 3 มาเร…
17นาที

5. การหยิบและวาง
ในโมดูลที่ 5 คุณจะได้เพิ่มคำสั่งเพื่อจัดการอินพุตจากเซ็นเซอร์ ควบคุมการทำงานของอุปกรณ์มือจับ และเปลี…
11นาที

6. การสื่อสารระหว่างหุ่นยนต์
ในโมดูลนี้ คุณจะได้เรียนรู้วิธีตั้งค่าการสื่อสารระหว่างหุ่นยนต์สองตัวเพื่อเปิดใช้การทำงานแบบซิงโครไน…
8นาที

7. การควบคุมสายพานลำเลียง
ในโมดูลที่ 7 คุณจะได้เรียนรู้วิธีควบคุมสายพานลำเลียงโดยใช้คำสั่งเงื่อนไขร่วมกับข้อมูลอินพุตของเซ็นเซ…
11นาที

8. การควบคุมแรง
โมดูลนี้จะมุ่งเน้นไปที่การสอนวิธีติดฉลากให้ถูกต้องแม่นยำโดยใช้ความสามารถในการควบคุมแรงของหุ่นยนต์ คุ…
12นาที

9. การวางบนพาเลท
ในโมดูลนี้ คุณจะได้เรียนรู้วิธีใช้เทมเพลตการจัดวางบนพาเลทของซอฟต์แวร์เพื่อโหลดถุงลงบนพาเลท
10นาที

10. การตั้งค่าสำหรับการผลิต
ในโมดูลนี้ คุณจะเตรียมหุ่นยนต์สำหรับการผลิตโดยเชื่อมต่อแผงควบคุมและกำหนดค่าหุ่นยนต์สำหรับการควบคุมจา…
10นาที

ขอแสดงความยินดี!
คุณผ่านหน่วยการเรียนทั้งหมดในแผนการเรียนรู้อิเล็กทรอนิกส์นี้แล้ว ลองเข้าสู่แผนการฝึกอบรมถัดไปหรือเข้าร่วมบทเรียนฝึกอบรมที่เราจัดไว้ให้
เรียนรู้เพิ่มเติมโดยเข้าไปที่บทเรียนฝึกอบรมของเราไปที่ภาพรวมเกี่ยวกับบทเรียนอิเล็กทรอนิกส์