ปิด 
Choose your language

แนวทางสำหรับมือโปร e-Series
แนวทางมือโปรเป็นการต่อยอดจากทักษะที่ได้เรียนรู้มาแล้วจากแนวทางแกนหลัก แต่จะสอนในหัวข้อที่ซับซ้อนยิ่งขึ้น หากคุณยังไม่รู้วิธีการใช้งานหุ่นยนต์ของ UR เราขอแนะนำให้คุณเรียนในแนวทางแกนหลักให้เสร็จสมบูรณ์ก่อนที่จะเริ่มเรียนในแนวทางสำหรับมือโปร
บราวเซอร์และการตั้งค่าที่แนะนำ เราขอแนะนำให้ใช้ Microsoft Edge หรือ Google Chrome เวอร์ชันล่าสุดเพื่อดูโมดูลอีเลิร์นนิง ต้องเปิดใช้งาน JavaScript
หน่วยการเรียน
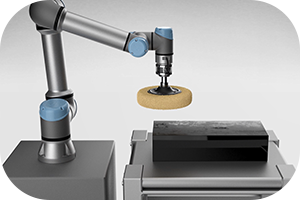
9. โครงสร้างของโปรแกรม
ในโมดูลนี้ คุณจะได้เรียนรู้วิธีใช้ตัวแปรและการกำหนดเงื่อนไขเพื่อสร้างการทำงานของโปรแกรมที่ก้าวหน้ายิ…
 16นาที
16นาที

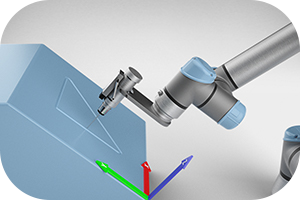
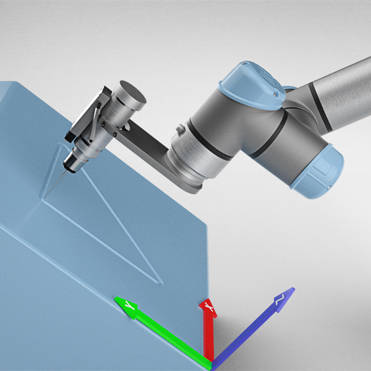
10. การตั้งค่าพิกัด FEATURE
ในโมดูลนี้ คุณจะได้เรียนรู้วิธีการสร้างระบบประสานงานที่กำหนดโดยผู้ใช้งาน, วิธีกำหนดจุดอ้างอิงที่สัมพ…
13นาที
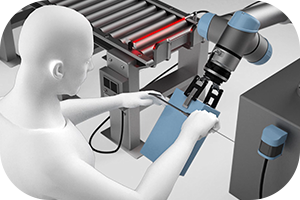
11. การควบคุมแรง
ในหน่วยการเรียนนี้ คุณจะได้เรียนรู้วิธีการใช้แม่แบบแรงของหุ่นยนต์เพื่อปรับค่าแรงในทิศทางต่าง ๆ ฟังก์…
12นาที