Închidere 
Choose your language

Tutoriale video
Explorați exemple de programare pas-cu-pas și tutoriale concepute pentru a vă ajuta să începeți să utilizați produsele Universal Robots.
Dacă doriți să învățați elementele esențiale ale programării unui robot UR, deschideți secțiunea de e-Learning gratuit, unde puteți găsi e-learning interactiv pentru ambii roboți – UR20/30, e-Series și CB3.

1 Noțiuni de bază despre proiecte în UR Studio
Aflați cum să creați, să deschideți, să salvați și să gestionați proiectele de programare a roboțilo…
 1m 21s
1m 21s


2 Navigarea prin stație în studioul UR
Descoperă cum să navighezi și să manipulezi vizualizarea stației și obiectele robotului în UR Studio…
1m 55s

3 Construirea celulei de lucru cu Catalogul UR Studio
Aflați cum să construiți rapid o celulă de lucru robot în UR Studio prin adăugarea de componente pre…
1m 47s

4 Detectarea coliziunilor în UR Studio
Explorați modul în care UR Studio evidențiază coliziunile în configurarea celulei de lucru a robotul…
0m 40s

5 Testarea accesibilității robotului în studioul UR
Aflați cum să evaluați accesibilitatea robotului în UR Studio pentru a alege modelul optim de robot…
1m 29s

6 Automatizarea controlului transportorului cu un senzor
Aflați cum să automatizați comportamentul transportorului în UR Studio folosind senzori și conexiuni…
1m 18s

7 Importarea modelelor 3D în UR Studio
Aflați cum să importați modele 3D personalizate în UR Studio ca accesorii, piese de prelucrat sau in…
0m 48s

8 Importarea pieselor de prelucrat personalizate în UR Studio
Aflați cum să importați și să configurați modele 3D externe ca piese de prelucrat în UR Studio, incl…
1m 11s

9 Importul și configurarea instrumentelor de capăt de braț în UR Studio
Aflați cum să importați, să poziționați și să configurați instrumente personalizate de capăt de braț…
1m 24s

10 Instalarea pachetelor UR Cap în UR Studio
Află cum să încarci, să instalezi și să gestionezi pachetele URCap în UR Studio, susținând extensiil…
1m 03s

11 Predați puncte direct cu programarea din umbră
Descoperiți cum să predați rapid mișcările robotului în UR Studio folosind programarea umbrei, fără…
1m 06s
1 Introducere în interfața grafică PolyScope X
În acest modul, veți vedea noua interfață grafică PolyScope X și unde să găsiți diferite lucruri.Mod…
2m 35s
2 Configurarea unui instrument cu ajutorul expertului
Vedeți cum să utilizați asistenții pentru a configura sarcina utilă, centrul de greutate (CoG), punc…
3m 28s

3 Cum se realizează un program simplu Pick and Place
În acest videoclip vă arătăm cum să realizați un program simplu Pick and Place folosind PolyScope X.
3m 27s
4 Utilizarea modulelor și a funcțiilor pentru a crește lizibilitatea și reutilizarea programului dvs.
Învățați cum să creați module și funcții. Acest lucru va crește lizibilitatea programului dvs. și îl…
2m 49s
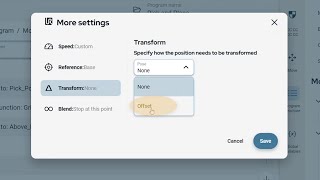
5 5 Transformarea pozițiilor cu Offsets pentru a minimiza numărul de puncte de trecere
Aflați cum să Transformați un punct de trecere folosind un offset definit de utilizator. Acest lucru…
2m 18s

6 Creați o grilă în aplicația dvs.
Aflați cum să utilizați funcția Grid din PolyScope X, pentru a minimiza numărul de puncte de cale ne…
2m 27s
7 O aplicație CNC simplă folosind grila, module și funcții și transformări
În acest modul, caracteristicile: Module și Funcțiile, Grilele și Transformarea cu offset-uri sunt u…
3m 21s
8 Caracteristici ale ecranului Operator
Aflați cum să configurați ecranul operatorului. Cum să faceți variabilele de intrare și selecțiile a…
3m 45s

9 Scurtă trecere în revistă a șablonului mașinii de strung CNC
Vedeți o scurtă trecere în revistă a șablonului pentru o aplicație de mașină de strunjit CNC. Învăța…
1m 26s
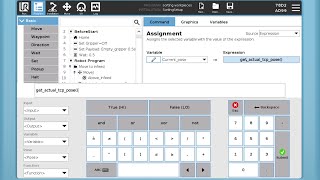
1 Introducere în URScript
Obțineți o introducere unde ați utilizat deja URScript. Unde găsiți cele mai comune funcții și cum e…
7m 46s

2 Arhitectura de execuție a sistemului
Prezentare generală a arhitecturii de execuție a sistemului URScript, pentru a oferi o explicație a…
8m 54s
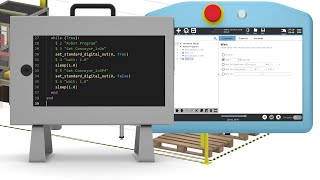
3 Conversia Node în URScript
Prezentare simplă a modului în care un program poate fi convertit în URScript. Aceasta oferă o înțel…
3m 33s
4 Server Dashboard
Aflați cum să utilizați o conexiune TCP/IP Socket https://docs.universal-robots.com/tutorials/urscri…
4m 09s
5 Interfețe și URScript la distanță
Obțineți o prezentare generală a diferitelor interfețe de comunicare https://www.universal-robots.co…
7m 15s
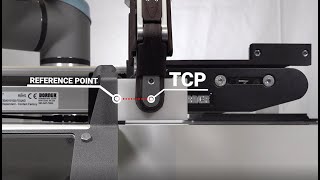
Configurație unelte TCP, orientarea, încărcătura și centrul de greutate
Acest tutorial vă conduce prin toate fazele de configurare a unei unelte/unui receptor final
4m 33s

Învățați efectuarea supravegherii mașinilor cu Universal Robots
Încercați noul nostru modul de supraveghere a mașinilor în „e-Series Traseu Aplicație” în „Training…
3m 05s

Îmbunătățiți și accelerați programarea cu ajutorul funcției de deplasare liberă (Freedrive) impusă
Începând cu versiunea 5.8 a Polyscope, forțarea rotației sau a mișcării pe axe liniare este posibilă…
2m 40s

Previne coliziunea după oprirea programului cu o "Secvență înainte de start"
Ați avut deja experiența unei coliziuni a robotului cu împrejurimile la repornire după o oprire a pr…
4m 59s
Măsurați dimensiunile obiectelor numai prin folosirea unui gripper
Învățați cum să programați robotul să măsoare dimensiunile obiectelor folosind numai un gripper și u…
5m 57s
Cum se folosește senzorul de forță pentru detectarea obiectelor
Cum se folosește senzorul de forță pentru detectarea obiectelor (comandă direcție/deplasare până la…
3m 54s
Cum se aliniază TCP activ la o caracteristică
În acest tutorial video veți învăța cum se aliniază TCP activ la o caracteristică.
1m 44s
CB3: Cum se schimbă încărcătura și centrul de greutate în timpul executării programului
În acest tutorial video veți învăța cum se schimbă încărcătura și centrul de greutate în timpul exec…
2m 42s

Siguranță: restricționare unghi direcție sculă
Învățați cum să faceți mai sigură aplicația dumneavoastră prin restricționarea unghiului în care est…
3m 44s

Siguranță: setări limite și viteză articulații
Învățați cum să limitați domeniul și viteza de mișcare pentru fiecare articulație individuală a robo…
2m 47s

Siguranță: Creați și configurați planuri de siguranță
Învățați cum să creați și să configurați planuri de siguranță. Planurile pot preveni deplasarea robo…
2m 00s

1 Unboxing
2m 10s

2 Hardware Installation
3m 16s

3 Software Setup
0m 41s

4 Calibration
1m 36s