Închidere 
Choose your language

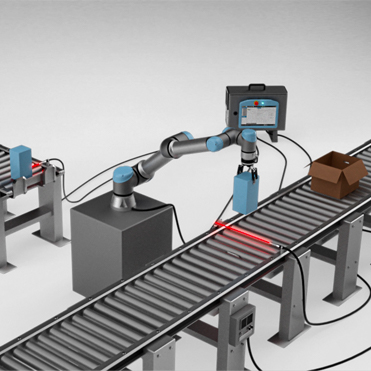
e-Series Traseu de bază
Traseul de bază explică toate conceptele, terminologia şi comenzile de programare esenţiale necesare pentru a utiliza un robot UR. Cele 8 module reprezintă o simulare pas cu pas a configurării şi programării unei aplicaţii pick-and-place complete.
Browser și setări recomandate. Recomandăm utilizarea celei mai recente versiuni a Microsoft Edge sau Google Chrome pentru a vizualiza modulele de training online JavaScript trebuie să fie activat.
Module
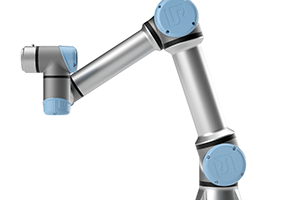
1. Prima impresie: Robotul pe scurt
Acest modul vă oferă o scurtă prezentare a robotului, a interfeței cu utilizatorul, a intrărilor/ieș…


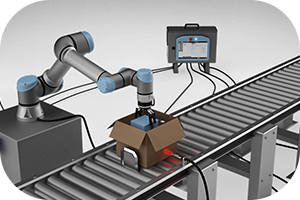
2. Pregătirea unei sarcini pentru robot
În acest modul, veţi pregăti robotul pentru o sarcină de tip pick-and-place (preia şi plasează) cone…
6m

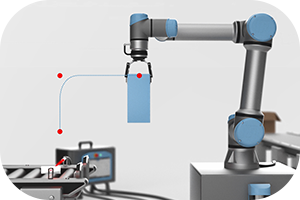
3. Configurarea unei unelte
Aflaţi cum să găsiţi şi să configuraţi punctul central al sculei, cum să învăţaţi robotul orientarea…
17m
4. Crearea unui program
În acest modul, veţi afla despre diferitele tipuri de mişcare ale robotului şi veţi programa toate m…
12m
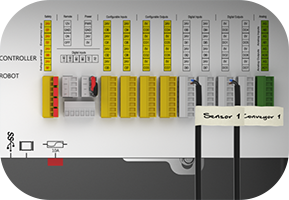
5. Interacțiunea cu dispozitive externe
În acest modul, veţi afla cum să utilizaţi graifărul, cum să interacţionaţi cu senzorii şi cum să mo…
11m
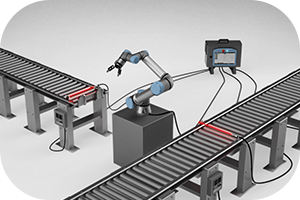
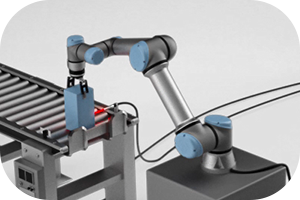
6. Controlul transportoarelor
În acest modul, veţi afla cum să controlaţi transportoarele folosind un fir.
10m
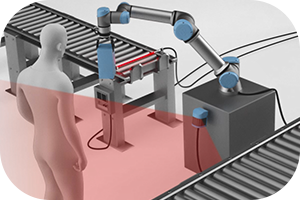
7. Setări de siguranță
În acest modul, veţi afla cum să folosiţi diferite setări de siguranţă în aplicaţia pick-and-place:
…
15m
8. Optimizare
În acest modul, veţi afla cum să optimizaţi aplicaţia pick-and-place prin adăugarea unei raze de îmb…
6m