

Dispunerea celulelor și testul de accesibilitate
Care este robotul de care aveți nevoie pentru stația dvs. de paletizare? Și unde amplasați paletul (paleții) și robotul? Cum vă asigurați că robotul este capabil să ajungă la toate pozițiile paleților?
În acest pas, veți învăța cele mai bune practici de dispunere a celulelor pentru a vă permite să creați o primă schiță a propriei stații de paletizare.
De asemenea, veți învăța cum să efectuați un test de accesibilitate într-un instrument de simulare pentru a verifica dacă robotul poate ajunge la toate straturile și pozițiile de pe palet și dacă robotul nu se ciocnește de niciun obiect. Testul de accesibilitate vă ajută, de asemenea, să determinați ce tip de graifăr este necesar și dacă aveți nevoie de o a șaptea axă.
- Crearea primului proiect al stației de paletizare
- Efectuarea testului de accesibilitate pentru a verifica dacă robotul poate ajunge la toate nivelurile și pozițiile
Descărcări
Module

 Descoperire
Descoperire
2.1. Cele mai bune practici privind dispunerea celulelor
- Dispunere
- Poziționarea paleților
- Fixarea robotului
- Fixarea graifărului
 Descoperire
Descoperire
2.2. Teoria testului de accesibilitate
- Accesibilitatea tuturor pozițiilor
- Detectarea coliziunilor
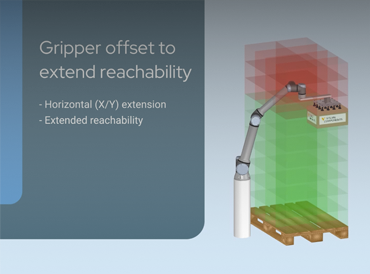
- Necesitatea celei de-a șaptea axe
 Practic
Practic
2.3. Caz de client - partea 2: dispunerea celulelor și testul de accesibilitate
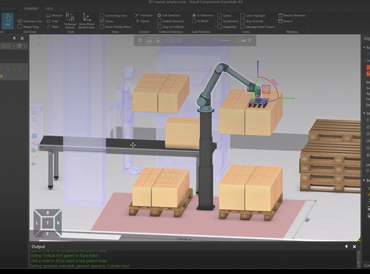
- Dispunerea celulelor 3D
- Test de accesibilitate
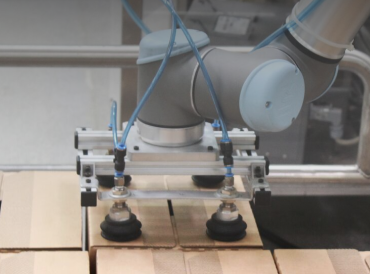
- Proiectarea și fixarea graifărului
Link-uri conexe

Verificarea obiectivelor
Verificați dacă ați atins toate obiectivele pentru această etapă și dacă aveți tot ce vă trebuie pentru a continua.
Etapa următoare :
3. Selectarea și testarea graifărului
După ce ați finalizat configurația stației de paletizare și ați efectuat un test de accesibilitate, următorul pas este să selectați un graifăr care să funcționeze bine cu materialele pe care le paletizați.
În această etapă veți afla cum funcționează diferite graifăre, pentru ce materiale sunt potrivite și de ce este esențială efectuarea unui test de prindere înainte de a investi într-un graifăr.