Bezárás 
Choose your language

Videóútmutatók
Fedezze fel a lépésről lépésre bemutatott programozási példákat és oktatóanyagokat, amelyek segítenek az Universal Robots termékek használatának megkezdésében.
Ha meg szeretné tanulni a UR robotok programozásának alapjait, olvassa el az Ingyenes e-tanulás című szakaszt, amelyben interaktív elektronikus oktatást találhat mind az UR20/30, e-Serieshez, mind a CB3 robotokhoz.

1 Kezdő lépések a UR Studio projektjeivel
Ismerje meg, hogyan hozhat létre, nyithat meg, menthet és kezelhet robotprogramozási projekteket a U…
 1 p 21 mp
1 p 21 mp


2 Navigálás az állomáson a UR Studio-ban
Fedezze fel, hogyan lehet navigálni és manipulálni az állomásnézetet és a robotobjektumokat a UR Stu…
1 p 55 mp

3 Építse fel munkacelláját az UR Studio katalógussal
Ismerje meg, hogyan lehet gyorsan felépíteni egy robot munkacellát az UR Studio-ban olyan komponense…
1 p 47 mp

4 Ütközésészlelés az UR Stúdióban
Fedezze fel, hogy a UR Studio hogyan emeli ki az ütközéseket a robot munkacella beállításaiban, hogy…
0 p 40 mp

5 A robot elérhetőségének tesztelése a UR Stúdióban
Ismerje meg, hogyan értékelheti a robot elérhetőségét az UR Studio-ban, hogy kiválassza az optimális…
1 p 29 mp

6 Szállítószalag vezérlés automatizálása érzékelővel
Tekintse meg, hogyan automatizálhatja a szállítószalag viselkedését az UR Studio-ban érzékelők és je…
1 p 18 mp

7 3D modellek importálása a UR Stúdióba
Ismerje meg, hogyan importálhat egyedi 3D modelleket a UR Studio alkalmazásba tartozékként, munkadar…
0 p 48 mp

8 Egyedi munkadarabok importálása a UR Stúdióba
Ismerje meg, hogyan importálhat és konfigurálhat külső 3D modelleket munkadarabként a UR Studio-ban,…
1 p 11 mp

9 Karvégi eszközök importálása és konfigurálása a UR Stúdióban
Ismerje meg, hogyan importálhat, helyezhet el és konfigurálhat egyedi karvégű eszközöket a UR Studio…
1 p 24 mp

10 A UR Cap csomagok telepítése a UR Stúdióban
Ismerje meg, hogyan tölthet fel, telepíthet és kezelhet URCap csomagokat a UR Studio-ban, támogatva…
1 p 03 mp

11 Pontok tanítása közvetlenül az árnyékprogramozással
Fedezze fel, hogyan lehet gyorsan megtanítani a robotmozgásokat a UR Studio-ban árnyékprogramozással…
1 p 06 mp
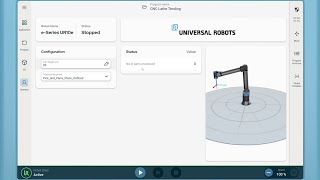
1 Bevezetés a PolyScope X felhasználói felületéhez
Ebben a modulban megismerheti a PolyScope X vadonatúj felhasználói felületét, és megtudhatja, hogy m…
2 p 35 mp
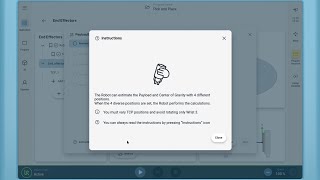
2 Eszköz konfigurálása a varázsló segítségével
Nézze meg, hogyan használhatja a varázslókat a hasznos teher, a súlypont (CoG), a szerszámközéppont…
3 p 28 mp

3 Hogyan készítsünk egy egyszerű Pick and Place programot?
Ebben a videóban megmutatjuk, hogyan készítsünk egy egyszerű Pick and Place programot a PolyScope X…
3 p 27 mp
4 Modulok és függvények használata a program olvashatóságának és rugalmasságának növelésére
Tanulja meg, hogyan készítsen modulokat és funkciókat. Ez növeli a program olvashatóságát, és egysze…
2 p 49 mp
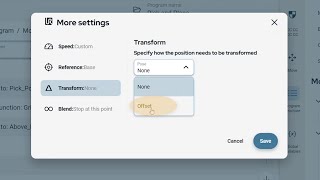
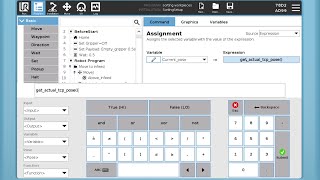
5 Pozíciók transzformálása eltolással az útpontok számának minimalizálása érdekében
Ismerje meg, hogyan alakíthat át egy útpontot egy felhasználó által meghatározott eltolással. Ez min…
2 p 18 mp

6 Rács készítése az alkalmazásban
Ismerje meg, hogyan használhatja a PolyScope X Rács funkcióját a szükséges útpontok számának minimal…
2 p 27 mp
7 Egy egyszerű CNC kiszolgáló alkalmazás a rács, a modulok és függvények, valamint a transzformációk használatával
A modulok és függvények, a rácsok és a transzformáció eltolással egy egyszerű CNC-kiszolgáló alkalma…
3 p 21 mp
8 A kezelői képernyő kialakítása
Ismerje meg a kezelői képernyő beállítását. Hogyan lehet a bemeneti változót és a kiválasztásokat a…
3 p 45 mp

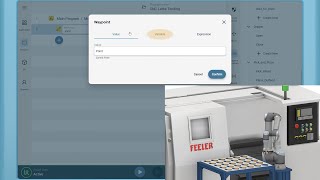
9 A CNC esztergagép sablonjának rövid bemutatása
Tekintse meg a sablon rövid bemutatását egy CNC esztergagép -kiszolgáló alkalmazáshoz. Tanítsa be a…
1 p 26 mp
1 Bevezetés az URScript-be
Ismerkedjen meg azzal, hogy hol használta már az URScriptet. Hol találod a leggyakoribb függvényeket…
7 p 46 mp

2 A rendszer végrehajtási architektúrája
Az URScript rendszervégrehajtási architektúrájának áttekintése, hogy magyarázatot adjon arra, hogy „…
8 p 54 mp
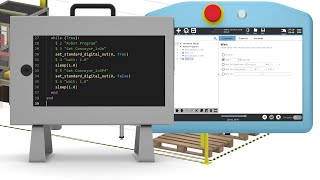
3 Node to URScript konverzió
Egyszerű bemutató arról, hogyan lehet egy programot URScript-be konvertálni. Ez alapvető megértést a…
3 p 33 mp
4 Dashboard szerver
Ismerje meg, hogyan használhat egy TCP/IP Socket kapcsolatot https://docs.universal-robots.com/tutor…
4 p 09 mp
5 Interfészek és távoli URScript
Tekintse át a PolyScope 5 különböző kommunikációs interfészeit https://www.universal-robots.com/prod…
7 p 15 mp
Szerszámkonfiguráció: TCP, tájolás, terhelés és gravitációs középpont
Ez az oktatóanyag végigvezeti Önt a szerszám/működő szerv konfigurálási lépésein
4 p 33 mp

Tanulja meg a gépek kiszolgálását a Universal Robots segítségével
Próbálja ki az új gépkiszolgáló modulunkat az Online képzés e-Series Alkalmazások pontjában. Itt let…
3 p 05 mp

Javítsa és gyorsítsa a programozást a korlátozott szabad mozgás funkcióval
A Polyscope 5.8-as verziójától kezdődően lehetősége van az elfordulás vagy az elmozdulás lineáris te…
2 p 40 mp

A program leállítása utáni ütközés megakadályozása a „Before Start szakasszal”
Előfordult már, hogy robotja ütközött a környezetével, amikor egy program leállítása után újraindíto…
4 p 59 mp
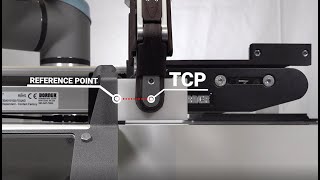
Az objektum méretének mérése kizárólag gripperrel
Tanulja meg, hogyan programozhatja a robotot tárgyak mérésére kizárólag a gripper és referenciapont…
5 p 57 mp
Az erőérzékelő használatának módja objektumok észlelésére
Az erőérzékelő használatának módja objektumok észlelésére (irányítási utasítás/mozgás az eszközzel v…
3 p 54 mp
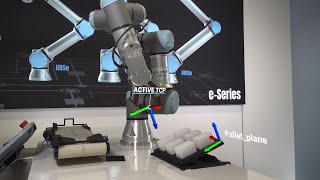
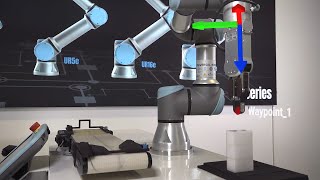
Az aktív TCP igazításának módja a jellemzőkhöz
Ebben a videóútmutatóban megtanulja, hogyan igazíthatja az aktív TCP-t a jellemzőkhöz.
1 p 44 mp
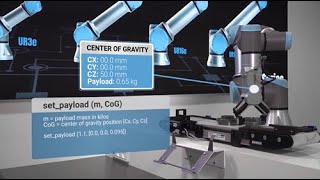
CB3: A terhelés és a tömegközéppont módosításának módja a program végrehajtása alatt
Ebben a videóútmutatóban megtanulja, hogyan módosíthatja a terhelést és a tömegközéppontot a program…
2 p 42 mp

Biztonság: szerszám irányszögének korlátozása
Tudja meg, hogyan teheti munkáját biztonságosabbá annak a szögnek a korlátozásával, ahogy a karon lé…
3 p 44 mp

Biztonság: csuklóhatárok és sebesség beállítása
Tudja meg, hogyan kell beállítani az egyéni robot egyes csuklóinak a mozgási területét és sebességét
2 p 47 mp

Biztonság: biztonsági síkok létrehozása és konfigurálása
Ismerje meg, hogyan hozható létre és konfigurálható a biztonsági sík. A síkok megakadályozzák, hogy…
2 p 00 mp

1 Unboxing
2 p 10 mp

2 Hardware Installation
3 p 16 mp

3 Software Setup
0 p 41 mp

4 Calibration
1 p 36 mp