

Cellaelrendezés és az elérhetőségi teszt
Melyik robotra van szüksége a raklapozó állomáshoz? Illetve hová helyezi a raklapo(ka)t és a robotot? Hogyan biztosítható, hogy a robot minden raklaphelyzetet elérjen?
Ebben a lépésben megtanulja a cellák elrendezésének bevált gyakorlatait, hogy elkészíthesse saját raklapozó állomásának első tervezetét.
Azt is megtanulja, hogyan végezzen elérhetőségi tesztet egy szimulációs eszközben annak ellenőrzésére, hogy a robot eléri-e a raklapon lévő összes réteget és helyzetet, és hogy a robot nem ütközik-e más tárgyakkal. Az elérhetőségi teszt segít annak meghatározásában is, hogy milyen típusú megfogóra van szüksége, és hogy szükség van-e 7. tengelyre.
- A raklapozó állomás első tervezetének elkészítése
- Elérhetőségi teszt elvégzése annak ellenőrzésére, hogy a robot minden réteget és helyzetet el tud-e érni.
Letöltések
Modulok

 Bemutató
Bemutató
2.1. A cellák elrendezésének bevált gyakorlatai
- Elrendezés kialakítása
- Raklap elhelyezése
- Robot felszerelése
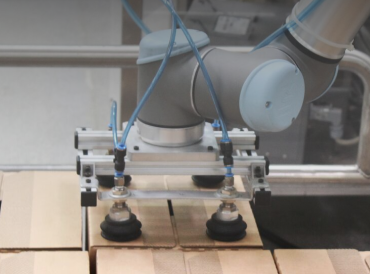
- Megfogó felszerelése
 Bemutató
Bemutató
2.2. Az elérhetőségi teszt elmélete
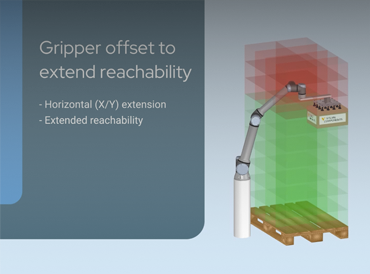
- Az összes helyzet elérhetősége
- Ütközések észlelése
- A 7. tengely szükségessége
 Gyakorlatorientált tanulás
Gyakorlatorientált tanulás
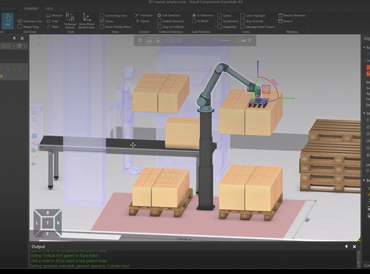
2.3. Ügyféleset – 2. rész: cellaelrendezés és az elérhetőségi teszt
- 3D-s cellaelrendezés
- Elérhetőségi teszt
- Megfogó kialakítása és felszerelése
Kapcsolódó hivatkozások

Célok ellenőrzése
Ellenőrizze, hogy elérte-e az összes célt ebben a szakaszban, és minden szükséges dologgal rendelkezik-e a folytatáshoz.
Tovább szakasz :
3. Megfogó kiválasztása és tesztelése
Ha véglegesítette a raklapozó állomás elrendezését, és elvégzett egy elérhetőségi tesztet, a következő lépés egy olyan megfogó kiválasztása, amely jól működik a raklapozni kívánt anyagokkal.
Ebben a szakaszban megtudhatja, hogyan működnek a különböző megfogórendszerek, milyen anyagokhoz alkalmasak, és miért elengedhetetlen a megfogási teszt elvégzése, mielőtt beruházna egy megfogóba.