Bezárás 
Choose your language


PolyScope X – e-tanulás
Lépjen be az automatizálás következő generációjába a PolyScope X segítségével. Csatlakozzon feletteséhez, Bryanhez, a gyárpadlón egy interaktív, gyakorlati tanulási élményhez. Kövesse őt, ahogy végigvezeti Önt a valós feladatokon, és megtanítja, hogyan kell beállítani és programozni egy UR20 robotot a hatékony új PolyScope X szoftver segítségével.
MEGJEGYZÉS: A tartalom csak angol nyelven érhető el.
Ajánlott böngésző és beállítások. Az e-tanulási modulok megtekintéséhez javasoljuk a Microsoft Edge vagy a Google Chrome legújabb verziójának használatát. Engedélyezni kell a JavaScriptet.
Modulok

1. Hardveráttekintés és beállítás
Az első modul a robot hardverének és szoftverének áttekintésével kezdődik. Ezután felkészíti majd a…
 15p
15p


2. Eszközök konfigurálása
A 2. modulban megismerheti az 1. modulban felszerelt gripper konfigurálásával kapcsolatos alapvető f…
20p
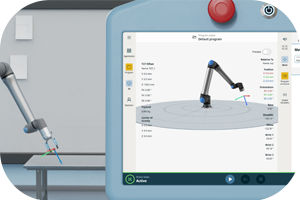
3. Mozgás és mozgástípusok
A 3. modulban megismerkedsz a robot különböző mozgásaitípusaival és azzal, hogyan lehet a robotot a…
8p

4. Program készítése
A 4. modulban a 3. modulban a mozgásról és mozgástípusokról tanultakat felhasználva elkezd összeállí…
15p

5. Felszedés és elhelyezés
Az 5. modulban parancsokat adhat hozzá az érzékelőtől érkező bemenetek kezeléséhez, a gripper működt…
11p
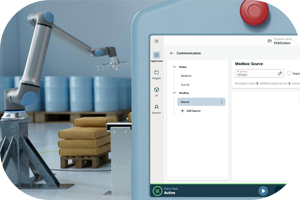
6. Robotok közötti kommunikáció
Ebben a modulban megismeri, hogyan állíthatja be a kommunikációt két robot között a szinkronizált mű…
8p

7. Hamarosan érkezik!
Hamarosan érkezik!

8. Hamarosan érkezik!
Hamarosan érkezik!
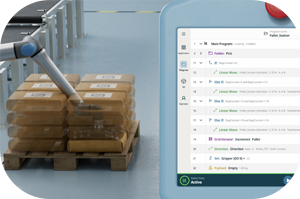
9. Raklapozás
Ebben a modulban megtanulja, hogyan lehet raklaprácsot létrehozni, és a rácsiterátort használni az e…
12p

Gratulálunk!
Az e-tanulás ezen szakaszának összes modulját elvégezte. Rátér a következő szakaszra, vagy részt kíván venni képzési kurzusainkon?
Folytassa a tanulást valamelyik képzési kurzusunkon.Tovább az ingyenes e-tanulás áttekintéséhez