Close 
Choose your language

e-Series Core Track
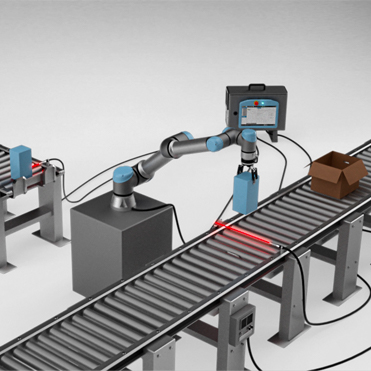
The Core Track teaches all essential concepts, terminology and programming commands needed to operate a UR robot. The 8 modules are a step-by-step simulation of setting up and programming a complete pick-and-place application.
Recommended Browser & Settings. We recommend using the latest version of Microsoft Edge or Google Chrome to view the e-Learning modules. JavaScript must be enabled.
Modules
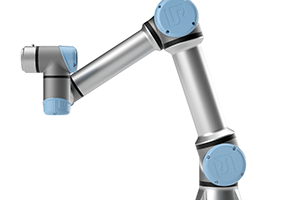
1. First look: The robot at a glance
This module gives you a short introduction to the robot, user interface, I/Os and functions.
 7m
7m

2. Preparing a robot task
In this module, you will prepare the robot for a pick-and-place task by connecting an end-effector,…
6m

3. Setting up a tool
Learn how to find and configure the tool center point, how to teach tool orientation, and how to tea…
17m
4. Creating a program
In this module you will learn about the robot’s different motion types, and you will program all the…
12m
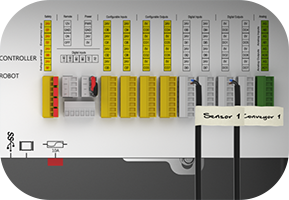
5. Interaction with external devices
In this module, you will learn how to operate the gripper, how to interact with sensors, and how to…
11m
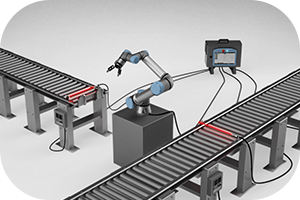
6. Controlling conveyors
In this module, you will learn how to control the conveyors by using a thread.
10m
7. Safety settings
In this module, you will learn how to apply different safety settings to the pick-and-place applicat…
15m
8. Optimizing
In this module, you will learn how to optimize the pick-and-place application by adding blend radius…
6m