Cerrar 
Choose your language

Tutoriales de vídeo
Explora ejemplos de programación paso a paso y tutoriales diseñados para ayudarte a dar tus primeros pasos con los productos de Universal Robots.
Si quiere aprender las nociones básicas sobre la programación de un robot de UR, visite nuestra sección de formación en línea gratuita donde podrá adquirir conocimientos de manera interactiva para los robots de UR20/30, e-Series y CB3.

1 Introducción a los proyectos en UR Studio
Aprende a crear, abrir, guardar y gestionar proyectos de programación de robots en UR Studio utiliza…
 1 m 21 s
1 m 21 s


2 Navegación por la estación en UR Studio
Descubra cómo navegar y manipular la vista de la estación y los objetos del robot en UR Studio utili…
1 m 55 s

3 Construye tu célula de trabajo con el catálogo de UR Studio
Aprende a construir rápidamente una celda de trabajo robótica en UR Studio añadiendo componentes com…
1 m 47 s

4 Detección de colisiones en UR Studio
Explore cómo UR Studio destaca las colisiones en la configuración de la celda de trabajo de su robot…
0 m 40 s

5 Probando la accesibilidad del robot en UR Studio
Aprenda a evaluar la accesibilidad del robot en UR Studio para elegir el modelo de robot óptimo para…
1 m 29 s

6 Automatización del control del transportador con un sensor
Vea cómo automatizar el comportamiento del transportador en UR Studio utilizando sensores y conexion…
1 m 18 s

7 Importación de modelos 3D en UR Studio
Aprenda a importar modelos 3D personalizados en UR Studio como accesorios, piezas de trabajo o herra…
0 m 48 s

8 Importación de piezas de trabajo personalizadas en UR Studio
Aprenda a importar y configurar modelos 3D externos como piezas de trabajo en UR Studio, incluido el…
1 m 11 s

9 Importación y configuración de herramientas de fin de brazo en UR Studio
Aprenda a importar, posicionar y configurar herramientas personalizadas de fin de brazo en UR Studio…
1 m 24 s

10 Instalación de paquetes UR Cap en UR Studio
Aprende a cargar, instalar y administrar paquetes URCap en UR Studio, admitiendo extensiones front-e…
1 m 03 s

11 Enseñar puntos directamente con Shadow Programming
Descubre cómo enseñar rápidamente los movimientos del robot en UR Studio utilizando la programación…
1 m 06 s
1 Introducción al GUI de PolyScope X
En este módulo, verá la nueva interfaz gráfica de PolyScope X y dónde encontrar cada cosa.Los próxim…
2 m 35 s
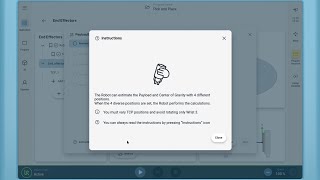
2 Configuración de una herramienta mediante el asistente
Vea cómo utilizar los asistentes para configurar la carga útil, el centro de gravedad (CoG), el punt…
3 m 28 s

3 Cómo hacer un sencillo programa Pick and Place
En este vídeo mostramos cómo realizar un sencillo programa Pick and Place utilizando PolyScope X.
3 m 27 s
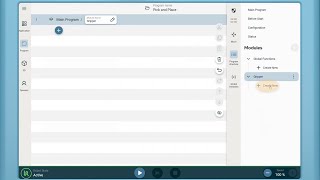
4 Utilización de módulos y funciones para aumentar la legibilidad y reutilización del programa
Aprende a hacer Módulos y funciones. Esto aumentará la legibilidad de su programa, y hacer que sea f…
2 m 49 s
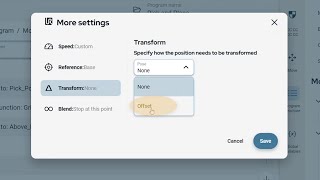
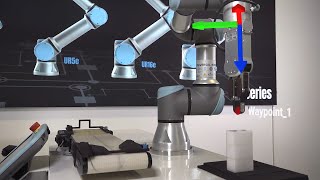
5 Transformar posiciones con Offsets para minimizar el número de waypoints
Aprenda a Transformar un waypoint utilizando un offset definido por el usuario. Esto minimizará el n…
2 m 18 s

6 Crea una cuadrícula en tu aplicación
Aprenda a utilizar la función de Cuadrícula en PolyScope X, para minimizar el número de waypoints ne…
2 m 27 s
7 Una aplicación CNC simple utilizando Grid, Módulos y Funciones, y Transformaciones
En este módulo las características: Módulos y Funciones, Rejillas, y Transformar con offsets se util…
3 m 21 s
8 Características de la pantalla Operador
Aprenda a configurar la pantalla del operador. Cómo hacer que las variables de entrada y las selecci…
3 m 45 s

9 Breve recorrido por la plantilla de la máquina de torno CNC
Vea un breve recorrido de la plantilla para una aplicación de Máquina de Torno CNC. Enseñe los punto…
1 m 26 s
1 Introducción a URScript
Obtén una introducción a donde ya has usado URScript. Dónde encontrar las funciones más comunes, y c…
7 m 46 s

2 Arquitectura de ejecución del sistema
Visión general de la arquitectura de ejecución del sistema URScript, para dar una explicación de «qu…
8 m 54 s
3 Conversión de nodo a URScript
Tutorial sencillo sobre cómo convertir un programa en URScript. Esto da una comprensión básica de có…
3 m 33 s
4 Servidor de cuadros de mando
Aprenda a utilizar una conexión TCP/IP Socket https://docs.universal-robots.com/tutorials/urscript-t…
4 m 09 s
5 Interfaces y URScript remoto
Obtenga una visión general de las diferentes interfaces de comunicación https://www.universal-robots…
7 m 15 s
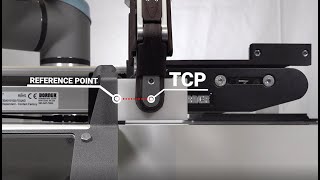
Configuración de herramienta: PCH, orientación, carga útil y centro de gravedad
Este tutorial le guiará a través de todos los pasos para configurar una herramienta/efector final
4 m 33 s

Aprenda a alimentar máquinas con Universal Robots
Pruebe nuestro nuevo módulo de alimentación de máquinas en el «Itinerario de aplicaciones de e-Serie…
3 m 05 s

Mejore y acelere la programación con un movimiento libre acotado
A partir de la versión 5.8 de Polyscope es posible acotar la rotación o el movimiento en los ejes li…
2 m 40 s

Evite colisiones tras la parada de un programa con la secuencia BeforeStart
¿Alguna vez le ha pasado que su robot ha colisionado con algo a su alrededor cuando lo ha reiniciado…
4 m 59 s
Medición de dimensiones de objetos solo con una pinza
Aprenda a programar el robot para medir dimensiones de objetos utilizando solo una pinza y un punto…
5 m 57 s
Cómo utilizar el sensor de fuerza para detectar objetos
Aprenda a utilizar el sensor de fuerza para detectar objetos (comando dirección/mover hasta el conta…
3 m 54 s
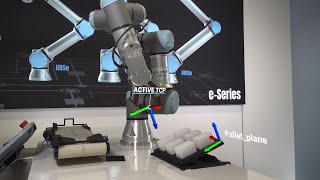
Cómo alinear el PCH activo con una función
En este tutorial aprenderá a alinear el PCH activo con una función.
1 m 44 s
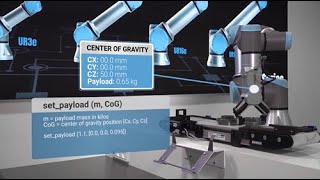
CB3: Cómo cambiar la carga útil y el centro de gravedad durante la ejecución de un programa
En este tutorial aprenderá a cambiar la carga útil y el centro de gravedad durante la ejecución de u…
2 m 42 s

Seguridad: restricción del ángulo de dirección de la herramienta
Aprenda a aumentar la seguridad de su aplicación restringiendo el ángulo al que la herramienta del e…
3 m 44 s

Seguridad: Limitación de la posición y velocidad de las articulaciones
Aprenda a limitar el rango de movimiento y la velocidad para cada articulación del robot individualm…
2 m 47 s

Seguridad: cree y configure planos de seguridad
Aprenda a crear y configurar planos de seguridad. Los planos pueden evitar que el robot se desplace…
2 m 00 s

1 Unboxing
2 m 35 s

2 Hardware Installation
3 m 16 s

3 Software Setup
0 m 41 s

4 Calibration
1 m 36 s