

Formación en línea de UR20/30
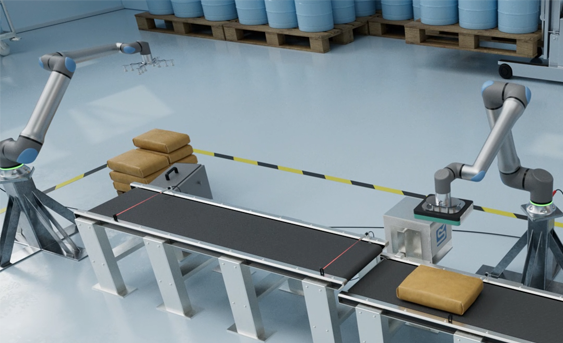
Adéntrate en el mundo de la automatización y reúnete con Bryan, el supervisor, en la fábrica, donde aprenderás habilidades prácticas reales en esta experiencia de formación inmersiva. Pon a prueba tus habilidades en gran variedad de tareas reales mientras Bryan te guía a través de cada paso de la configuración y programación de un robot UR20.
Si eres un nuevo usuario de Universal Robots, este es el mejor lugar para empezar.
Navegador recomendado y ajustes. Recomendamos utilizar la versión más reciente de Microsoft Edge o Google Chrome para ver los módulos de formación online. JavaScript debe estar habilitado.

 15m
15m

 20m
20m
 8m
8m
 17m
17m
 11m
11m
 8m
8m
 11m
11m
 12m
12m
 10m
10m
 10m
10m

¡Enhorabuena!
Has completado todos los módulos del itinerario de formación en línea. ¿Por qué no continúas con el siguiente itinerario o asistes a uno de nuestros cursos formativos?
Da un paso más en tu aprendizaje asistiendo a uno de nuestros cursos formativos.Ir a la vista general de la formación en línea gratuita