Cerrar 
Choose your language

Itinerario básico de e-Series
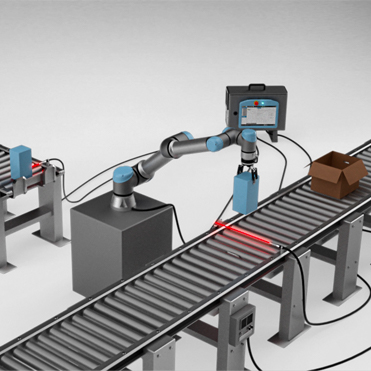
Con el itinerario básico se aprenden todos los conceptos, terminología y comandos de programación imprescindibles para manejar un robot de Universal Robots. Los ocho módulos forman una simulación «paso a paso» para configurar y programar una aplicación completa de pick & place.
Navegador recomendado y ajustes. Recomendamos utilizar la versión más reciente de Microsoft Edge o Google Chrome para ver los módulos de formación online. JavaScript debe estar habilitado.
Módulos
1. Primer vistazo: El robot a simple vista
Este módulo ofrece una breve introducción al robot, la interfaz de usuario, las E/S y las funciones.
 7m
7m

2. Preparación de una tarea para el robot
En este módulo preparará el robot para que realice una tarea pick & place mediante la conexión de un…
6m

3. Cómo ajustar una herramienta
Aprenderá a encontrar y configurar el punto central de herramienta y a enseñar la orientación de la…
17m
4. Crear un programa
En este módulo aprenderá los diferentes tipos de movimiento del robot, y luego programará los movimi…
12m
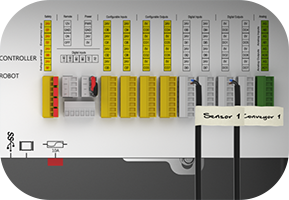
5. Interacción con dispositivos externos
En este módulo aprenderá a accionar la pinza, interactuar con los sensores y cambiar la carga útil a…
11m
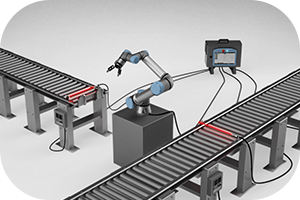
6. Control de las cintas transportadoras
En este módulo aprenderá a usar una subtarea para controlar las cintas transportadoras.
10m
7. Ajustes de seguridad
En este módulo estudiará cómo emplear los diferentes ajustes de seguridad en la aplicación de pick &…
15m
8. Optimización
En este módulo aprenderá cómo se añade el radio de transición a los puntos de paso pertinentes y cóm…
6m