Fechar 
Choose your language

Vídeo Aulas
Explore exemplos de programação passo a passo e tutoriais criados para ajudá-lo a começar a usar os produtos da Universal Robots.
Caso você queira aprender o básico sobre como programar um robô UR, você pode conferir a sessão de Cursos online Gratuito onde você vai encontrar aulas online interativas para a UR20/30, e-Series quanto para os robôs CB3.

1 Introdução aos projetos no UR Studio
Aprenda a criar, abrir, salvar e gerenciar projetos de programação de robôs no UR Studio usando mode…
 1 min. 21 s
1 min. 21 s


2 Navigating the Station in UR Studio
Descubra como navegar e manipular a visualização da estação e os objetos do robô no UR Studio usando…
1 min. 55 s

3 Construindo sua célula de trabalho com o catálogo UR Studio
Aprenda a construir rapidamente uma célula de trabalho robótica no UR Studio, adicionando componente…
1 min. 47 s

4 Detecção de colisão no UR Studio
Explore como o UR Studio destaca colisões na configuração da célula de trabalho do seu robô para aju…
0 min. 40 s

5 Testando a acessibilidade do robô no UR Studio
Aprenda a avaliar a acessibilidade do robô no UR Studio para escolher o modelo de robô ideal para o…
1 min. 29 s

6 Automatização do controle do transportador com um sensor
Veja como automatizar o comportamento da esteira transportadora no UR Studio usando sensores e conex…
1 min. 18 s

7 Importando modelos 3D para o UR Studio
Aprenda a importar modelos 3D personalizados para o UR Studio como acessórios, peças de trabalho ou…
0 min. 48 s

8 Importando peças personalizadas para o UR Studio
Aprenda a importar e configurar modelos 3D externos como peças de trabalho no UR Studio, incluindo d…
1 min. 11 s

9 Importação e configuração de ferramentas de extremidade do braço no UR Studio
Aprenda a importar, posicionar e configurar ferramentas personalizadas para o final do braço no UR S…
1 min. 24 s

10 Instalação dos pacotes UR Cap no UR Studio
Aprenda a fazer upload, instalar e gerenciar pacotes URCap no UR Studio, com suporte a extensões fro…
1 min. 03 s

11 Ensine pontos diretamente com a Programação Sombra
Descubra como ensinar rapidamente movimentos ao robô no UR Studio usando programação sombra, sem pre…
1 min. 06 s
1 Introdução à GUI do PolyScope X
Neste módulo, você verá a novíssima GUI do PolyScope X e onde encontrar o quê.Os próximos módulos se…
2 min. 35 s
2 Configuração de uma ferramenta usando o assistente
Veja como usar os assistentes para configurar a carga útil, o centro de gravidade (CoG), o ponto cen…
3 min. 28 s

3 Como criar um programa Pick and Place simples
Neste vídeo, mostramos como criar um programa Pick and Place simples usando o PolyScope X.
3 min. 27 s
4 Uso de módulos e funções para aumentar a legibilidade e a reutilização de seu programa
Saiba como criar módulos e funções. Isso aumentará a legibilidade de seu programa e facilitará a reu…
2 min. 49 s
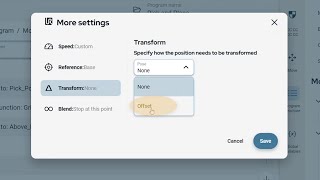
5 Transforme as posições com Offsets para minimizar o número de waypoints
Saiba como transformar um waypoint usando um deslocamento definido pelo usuário. Isso minimizará o n…
2 min. 18 s

6 Criar uma grade em seu aplicativo
Saiba como usar o recurso Grid no PolyScope X para minimizar o número de waypoints necessários. (Ele…
2 min. 27 s
7 Um aplicativo CNC simples usando Grid, Modules and Functions e Transforms
Neste módulo, os recursos: Módulos e funções, grades e transformação com deslocamentos são usados pa…
3 min. 21 s
8 Recursos da tela do operador
Saiba como configurar a tela do operador. Como tornar as variáveis de entrada e as seleções acessíve…
3 min. 45 s

9 Breve passo a passo do modelo de máquina de torno CNC
Veja um breve passo a passo do modelo para um aplicativo de máquina de torno CNC. Ensine os principa…
1 min. 26 s
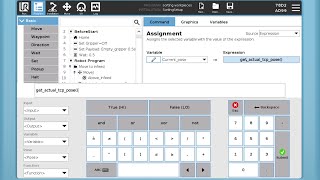
1 Introdução ao URScript
Obtenha uma introdução sobre onde você já usou o URScript. Onde encontrar as funções mais comuns e c…
7 min. 46 s

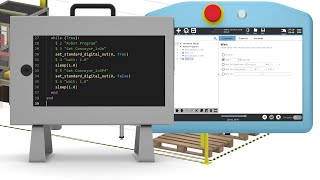
2 Arquitetura de execução do sistema
Visão geral da arquitetura de execução do sistema do URScript, para dar uma explicação de “o que vai…
8 min. 54 s
3 Conversão de Node para URScript
Passo a passo simples de como um programa pode ser convertido em URScript. Isso proporciona uma comp…
3 min. 33 s
4 Servidor de painel
Saiba como usar uma conexão TCP/IP Socket https://docs.universal-robots.com/tutorials/urscript-tutor…
4 min. 09 s
5 Interfaces e URScript remoto
Obtenha uma visão geral das diferentes interfaces de comunicação https://www.universal-robots.com/pr…
7 min. 15 s
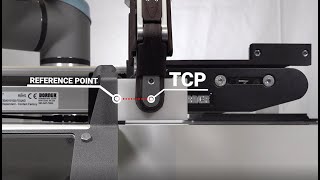
Configuração de ferramenta: TCP, orientação, carga útil e centro de gravidade
Este tutorial percorre todas as etapas de configuração de uma ferramenta/efector final
4 min. 33 s

Aprenda a fazer alimentação de máquinas com a Universal Robots
Experimente nosso novo módulo de alimentação de máquinas no “Curso e-Series Application” em “Treinam…
3 min. 05 s

Melhore e acelere sua programação com o free drive restringido
A partir da versão 5.8 do Polyscope, agora é possível restringir a rotação ou movimento nos eixos li…
2 min. 40 s

Você pode prevenir uma colisão depois que o programa parar usando a “ Sequência Antes de Iniciar”
Já aconteceu de um robô colidir com tudo que está à sua volta, assim que ele é reiniciado, depois qu…
4 min. 59 s
Meça as dimensões de um objeto usando apenas a pinça.
Aprenda como programar o robô para que ele meça as dimensões de um objeto usando apenas a pinça e um…
5 min. 57 s
Como usar o sensor de força para identificar objetos
Como usar o sensor de força para detectar objetos (comando de direção/mover até obter contato com a…
3 min. 54 s
Como alinhar um TCP ativo à um recurso
Nessa vídeo aula você vai aprender como alinhar o TCP ativo à um recurso.
1 min. 44 s
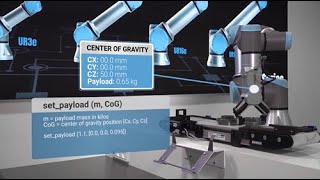
CB3: Como modificar a carga útil e o centro de gravidade durante a execução do programa
Nessa vídeo aula você vai aprender como modificar uma carga útil e o centro de gravidade durante a e…
2 min. 42 s

Segurança: restrição do ângulo de direção da ferramenta
Aprenda como tornar sua aplicação mais segura, restringindo o ângulo em que a ferramenta de extremid…
3 min. 44 s

Segurança: definição de limites e velocidade de articulação
Aprenda a restringir a amplitude e velocidade do movimento para cada articulação individual do robô
2 min. 47 s

Segurança: crie e configure planos de segurança
Aprenda a criar e configurar planos de segurança. Os planos podem impedir que o robô se mova além de…
2 min. 00 s

1 Unboxing
2 min. 10 s

2 Hardware Installation
3 min. 16 s

3 Software Setup
0 min. 41 s

4 Calibration
1 min. 36 s