

Layout da célula e teste de acessibilidade
Qual robô você precisa para sua estação de paletização? E onde você coloca o(s) palete(s) e o robô? Como garantir que o robô é capaz de alcançar todas as posições do palete?
Nesta etapa, você aprenderá as práticas recomendadas de layout da célula para criar o primeiro esboço de sua estação de paletização.
Você também aprenderá a realizar o teste de acessibilidade em uma ferramenta de simulação para verificar se o robô alcançará todas as camadas e posições do palete e se o robô não colidirá com nenhum objeto. O teste de acessibilidade também ajuda a determinar que tipo de pinça deve ser utilizada e se é necessário um sétimo eixo.
- Criar o primeiro esboço da estação de paletização
- Realizar o teste de acessibilidade e verificar se o robô alcança todas as camadas e posições
Downloads
Módulos

 Passo a passo
Passo a passo
2.1. Práticas recomendadas de layout de célula
- Design de layout
- Posicionamento de paletes
- Montagem do robô
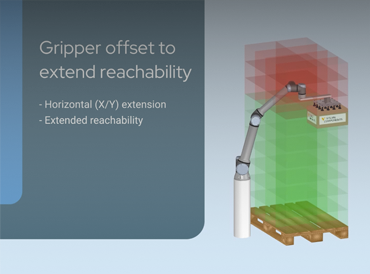
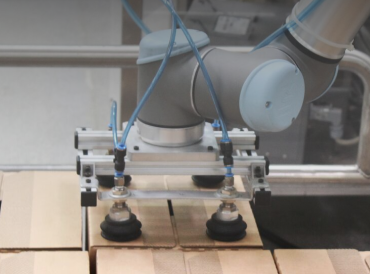
- Montagem da pinça
 Passo a passo
Passo a passo
2.2. A teoria do teste de acessibilidade
- Acessibilidade de todas as posições
- Detecção de colisões
- Necessidade do sétimo eixo
 Prática
Prática
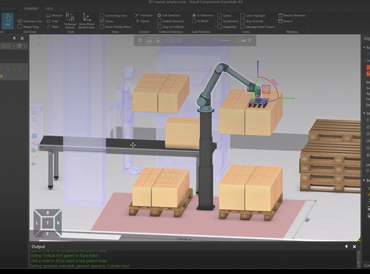
2.3. Caso do cliente – parte 2: layout da célula e teste de acessibilidade
- Layout de célula 3D
- Teste de acessibilidade
- Projeto e montagem da pinça
Links relacionados

Verificação de objetivos
Verifique se você alcançou todos os objetivos desta etapa e tem todo o necessário para prosseguir.
Etapa seguinte :
3. Seleção e teste de pinças
Depois de finalizar o layout da estação de paletização e realizar o teste de acessibilidade, a etapa seguinte é selecionar uma pinça que funcione bem com os materiais que você coloca nos paletes.
Nesta etapa, você aprenderá como funcionam os diferentes sistemas de pinças, para quais materiais eles são adequados e por que é essencial realizar um teste de fixação antes de investir em uma pinça.