Fechar 
Choose your language


Curso PolyScope X online
Entre na próxima geração de automação com o PolyScope X. Junte-se ao seu supervisor, Bryan, no chão de fábrica para uma experiência de aprendizagem interativa e prática. Acompanhe-o enquanto ele o orienta em tarefas da vida real e ensina como configurar e programar um robô UR20 usando o novo e poderoso software PolyScope X.
OBSERVAÇÃO: Conteúdo disponível somente em Inglês.
Navegador e configurações recomendados. Recomendamos usar a versão mais recente do Microsoft Edge ou do Google Chrome para visualizar os módulos de e-Learning. O JavaScript deve estar habilitado.
Módulos

1. Visão geral e configuração do hardware
No primeiro módulo, você começa com uma visão geral do hardware e do software do robô. Em seguida, v…
 15m
15m


2. Configuração de uma ferramenta
No módulo 2, você aprenderá conceitos e procedimentos essenciais relacionados à configuração da garr…
20m
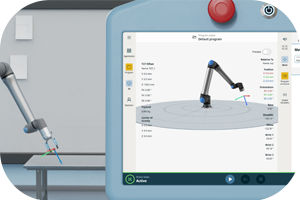
3. Tipos de movimento
No módulo 3, você aprenderá sobre os diferentes tipos de movimentos do robô e como movê-lo no ambien…
8m

4. Criação de programa
No módulo 4, você usará o que aprendeu sobre movimento e tipos de movimento no módulo 3 para começar…
15m

5. Seleção e colocação
No módulo 5, você adicionará comandos para lidar com a entrada do sensor, operar a garra e alterar a…
11m
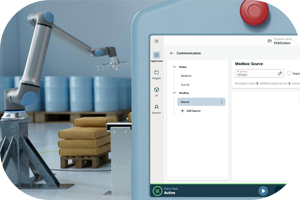
6. Comunicação entre robôs
Neste módulo, você aprenderá a configurar a comunicação entre dois robôs para permitir operações sin…
8m

7. Em breve!
Em breve!

8. Em breve!
Em breve!
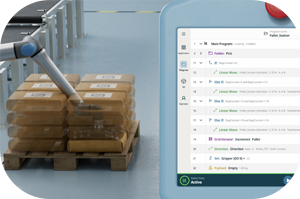
9. Paletização
Neste módulo, você aprenderá a criar uma grade de palete e a usar um iterador de grade para calcular…
12m

Parabéns!
Você completou todos os módulos desta parte do curso online. Por que não fazer a próxima parte ou participar de um de nossos cursos de treinamento?
Você aprende mais quando participa de um dos nossos cursos de treinamentoIr para a visão geral de cursos online gratuitos