

Układ celi i test zasięgu
Jaki robot jest potrzebny do stacji paletyzacji? Gdzie umieścisz paletę/palety i robota? Jak upewnisz się, że wszystkie pozycje na palecie są w zasięgu robota?
W tym kroku poznasz najlepsze praktyki w zakresie układu komórek, które umożliwią ci stworzenie pierwszego wstępnego schematu własnego stanowiska paletyzacji.
Dowiesz się również, jak przeprowadzić test zasięgu przy użyciu w narzędzia do symulacji, aby sprawdzić, czy wszystkie warstwy i pozycje na palecie są w zasięgu robota i czy robot nie koliduje z żadnymi obiektami. Test zasięgu pomaga również określić, jaki rodzaj pochwycenia jest wymagany i czy potrzebujesz siódmej osi.
- Tworzenie pierwszego wstępnego projektu stacji paletyzacji
- Wykonaj test zasięgu, aby sprawdzić, czy wszystkie warstwy i pozycje na palecie są w zasięgu robota
Do pobrania
Moduły

 Przewodnik
Przewodnik
2.1. Najlepsze praktyki dotyczące układu komórki
- Projektowanie układu
- Rozmieszczanie palet
- Montaż robota
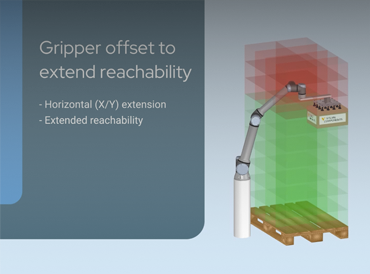
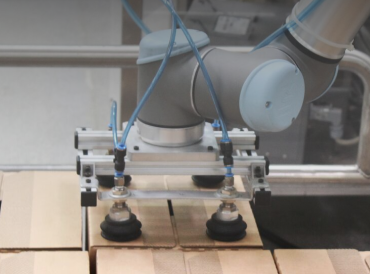
- Montaż chwytaka
 Przewodnik
Przewodnik
2.2. Teoria testu zasięgu
- Osiągalność wszystkich pozycji
- Wykrywanie kolizji
- Potrzeba siódmej osi
 Ćwiczenie
Ćwiczenie
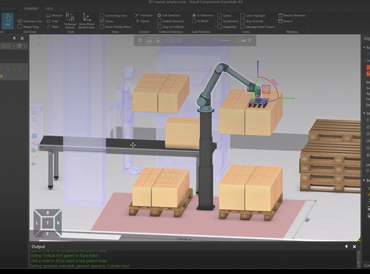
2.3. Przypadek zastosowania u klienta – część 2: układ komórki i test zasięgu
- Układ 3D komórki
- Test zasięgu
- Projekt i montaż chwytaka
Powiązane odnośniki

Weryfikacja celów
Sprawdź, czy osiągnąłeś wszystkie cele na tym etapie i czy masz wszystko, czego potrzebujesz, aby przejść dalej.
Następny etap :
3. Wybór i test chwytaka
Po zakończeniu ustawiania układu stacji paletyzacji i wykonaniu testu zasięgu następnym krokiem jest wybór chwytaka, który dobrze pasuje do paletyzowanych przedmiotów.
Na tym etapie dowiesz się, jak działają różne systemy chwytania, do jakich materiałów są odpowiednie i dlaczego konieczne jest przeprowadzenie testu chwytania przed zainwestowaniem w chwytak.