Zamknij 
Choose your language

Filmy samouczki
Zapoznaj się z przykładami programowania krok po kroku i samouczkami, które pomogą Ci rozpocząć pracę z produktami Universal Robots.
Jeśli chcesz poznać podstawy programowania robota UR, sprawdź sekcję Bezpłatne e-szkolenia, w której znajdziesz interaktywny e-learning zarówno dla robotów serii e, UR20/30 jak i CB3.

1 Pierwsze kroki z projektami w UR Studio
Dowiedz się, jak tworzyć, otwierać, zapisywać i zarządzać projektami programowania robotów w UR Stud…
 1 min 21 s
1 min 21 s


2 Poruszanie się po Stacji w UR Studio
Dowiedz się, jak nawigować i manipulować widokiem stacji i obiektami robota w UR Studio za pomocą na…
1 min 55 s

3 Budowanie komórki roboczej z katalogiem UR Studio
Dowiedz się, jak szybko zbudować komórkę roboczą robota w UR Studio, dodając komponenty, takie jak s…
1 min 47 s

4 Wykrywanie kolizji w UR Studio
Dowiedz się, w jaki sposób UR Studio wyróżnia kolizje w konfiguracji komórki roboczej robota, aby za…
0 min 40 s

5 Testowanie osiągalności robota w UR Studio
Dowiedz się, jak ocenić osiągalność robota w UR Studio, aby wybrać optymalny model robota do układu…
1 min 29 s

6 Automatyzacja sterowania przenośnikiem za pomocą czujnika
Zobacz, jak zautomatyzować zachowanie przenośnika w UR Studio za pomocą czujników i połączeń sygnało…
1 min 18 s

7 Importowanie modeli 3D do UR Studio
Dowiedz się, jak importować niestandardowe modele 3D do UR Studio jako akcesoria, przedmioty obrabia…
0 min 48 s

8 Importowanie niestandardowych przedmiotów do UR Studio
Dowiedz się, jak importować i konfigurować zewnętrzne modele 3D jako przedmioty obrabiane w UR Studi…
1 min 11 s

9 Importowanie i konfigurowanie narzędzi End-of-Arm w UR Studio
Dowiedz się, jak importować, ustawiać i konfigurować niestandardowe narzędzia na końcu ramienia w UR…
1 min 24 s

10 Instalacja pakietów UR Cap w UR Studio
Dowiedz się, jak przesyłać, instalować i zarządzać pakietami URCap w UR Studio, obsługując rozszerze…
1 min 03 s

11 Nauczaj punktów bezpośrednio za pomocą programu Shadow Programming
Dowiedz się, jak szybko nauczyć robota ruchów w UR Studio za pomocą programowania cienia, bez ręczne…
1 min 06 s
1 Wprowadzenie do GUI PolyScope X
W tym module zobaczysz zupełnie nowy graficzny interfejs użytkownika PolyScope X i dowiesz się, gdzi…
2 min 35 s
2 Konfiguracja narzędzia przy użyciu kreatora
Zobacz, jak używać kreatorów do konfigurowania obciążenia użytkowego, środka ciężkości (CoG), punktu…
3 min 28 s

3 Jak stworzyć prosty program Pick and Place
W tym filmie pokazujemy, jak stworzyć prosty program Chwyć i Umieść przy użyciu PolyScope X.
3 min 27 s
4 Korzystanie z modułów i funkcji w celu zwiększenia czytelności i możliwości ponownego wykorzystania programu
Dowiedz się, jak tworzyć moduły i funkcje. Zwiększy to czytelność programu i ułatwi jego ponowne uży…
2 min 49 s
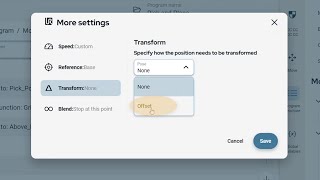
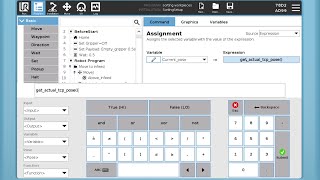
5 Przekształć pozycje z przesunięciami, aby zminimalizować liczbę punktów trasy
Dowiedz się, jak przekształcić punkt orientacyjny przy użyciu przesunięcia zdefiniowanego przez użyt…
2 min 18 s

6 Utwórz siatkę w swojej aplikacji
Dowiedz się, jak korzystać z funkcji siatki w PolyScope X, aby zminimalizować liczbę potrzebnych pun…
2 min 27 s
7 Prosta aplikacja CNC wykorzystująca siatkę, moduły i funkcje oraz transformacje
W tym module funkcje: Moduły i Funkcje, Siatki oraz Przekształcanie z przesunięciami są wykorzystywa…
3 min 21 s
8 Funkcje ekranu operatora
Dowiedz się, jak skonfigurować ekran operatora. Jak udostępnić operatorowi zmienne wejściowe i wybor…
3 min 45 s

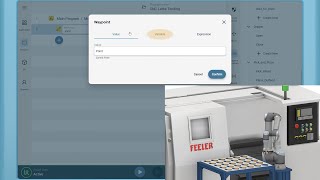
9 Krótki przewodnik po szablonie tokarki CNC
Zobacz krótki opis szablonu dla aplikacji tokarki CNC. Naucz się kluczowych punktów orientacyjnych,…
1 min 26 s
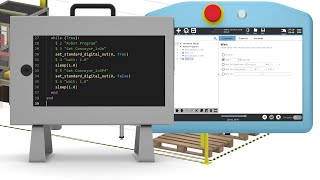
1 Wprowadzenie do URScript
Zapoznaj się z miejscami, w których już korzystałeś z URScript. Dowiedz się, gdzie znaleźć najczęści…
7 min 46 s

2 Architektura wykonania systemu
Przegląd architektury systemu wykonawczego URScript, aby wyjaśnić „co, gdzie trafia” https://www.uni…
8 min 54 s
3 Konwersja węzła programu do URScript
Prosty przewodnik po tym, jak program może zostać przekonwertowany na URScript. Uzyskasz podstawowe…
3 min 33 s
4 Serwer Dashboard
Dowiedz się, jak korzystać z połączenia Socketowego TCP/IP https://docs.universal-robots.com/t…
4 min 09 s
5 Interfejsy i zdalny URScript
Zapoznaj się z przeglądem różnych interfejsów komunikacyjnych https://www.universal-robots.com/produ…
7 min 15 s
Konfiguracja narzędzia TCP, orientacja, obciążenie i środek ciężkości
W tym samouczku zapoznasz się ze wszystkimi etapami konfiguracji narzędzia/efektora końcowego
4 min 33 s

Dowiedz się, jak korzystać z funkcji obsługi maszyn firmy Universal Robots
Wypróbuj nasz nowy moduł obsługi maszyn „Ścieżka aplikacji: e-Series” w „Szkoleniu online”. Możesz t…
3 min 05 s

Popraw i przyśpiesz swoje programowanie, korzystając z ograniczonego ruchu swobodnego
Od wersji 5.8 Polyscope możliwe jest teraz ograniczanie obrotu lub ruchu w osiach liniowych w trakci…
2 min 40 s

Zapobieganie kolizjom po zatrzymaniu programu za pomocą funkcji “Sekwencja Przed Uruchomieniem”.
Czy kiedykolwiek zdarzyło Ci się, że podczas ponownego uruchamiania po zatrzymaniu programu Twój rob…
4 min 59 s
Zmierz wymiary obiektu, korzystając wyłącznie z chwytaka
Dowiedz się, w jaki sposób można zaprogramować robota do mierzenia wymiarów obiektów przy użyciu sam…
5 min 57 s
W jaki sposób korzystać z czujnika siły do wykrywania obiektów
W jaki sposób korzystać z czujnika siły do wykrywania obiektów (polecenie kierunek / ruch do momentu…
3 min 54 s
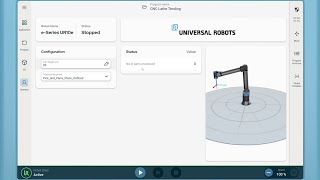
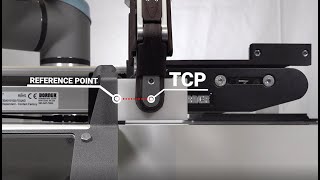
Jak dopasować aktywny tcp do układu
W niniejszym samouczku dowiesz się, jak dopasować aktywny TCP do układu.
1 min 44 s
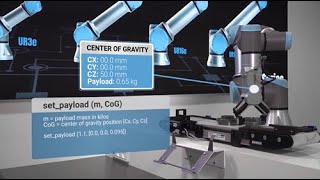
CB3: Jak zmieniać obciążenie i środek ciężkości podczas wykonywania programu
W niniejszym filmie samouczku dowiesz się jak zmieniać obciążenie i środek ciężkości podczas wykonyw…
2 min 42 s

Bezpieczeństwo: ograniczenie kąta kierunku narzędzia
Dowedz się, co zrobić, aby podnieść bezpieczeństwo aplikacji poprzez ograniczneie kąta ustawienia os…
3 min 44 s

Bezpieczeństwo: ustawianie limitów i prędkości przegubów
Dowiedz się, jak ograniczyć zakres i prędkość każdego z przegubów robota
2 min 47 s

Bezpieczeństwo: urtwórz i ustaw płaszczyzny bezpieczeństwa
Dowiedz się, jak tworzyć i ustawiać płaszczyzny bezpieczeństwa. Płaszczyzny mogą zapobiec ich przekr…
2 min 00 s

1 Unboxing
2 min 10 s

2 Hardware Installation
3 min 16 s

3 Software Setup
0 min 41 s

4 Calibration
1 min 36 s