Zamknij 
Choose your language


E-szkolenia na temat PolyScope X
Wkrocz w nową erę automatyzacji dzięki PolyScope X. Dołącz do swojego przełożonego, Bryana, na hali produkcyjnej, aby wziąć udział w interaktywnym, praktycznym szkoleniu. Podążaj za nim, gdy poprowadzi Cię przez rzeczywiste zadania i nauczy Cię, jak skonfigurować i zaprogramować robota UR20 za pomocą nowego, potężnego oprogramowania PolyScope X.
UWAGA: Treść dostępna tylko w języku angielskim.
Rekomendowana przeglądarka i ustawienia. Do przeglądania modułów e-learningowych zalecamy korzystanie z najnowszej wersji przeglądarki Microsoft Edge lub Google Chrome. Należy włączyć obsługę JavaScript.
Moduły

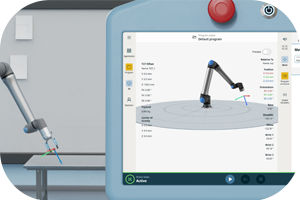
1. Przegląd sprzętu i konfiguracja
W pierwszym module rozpoczyna się przegląd sprzętu i oprogramowania robota. Następnie należy przygot…
 15min
15min


2. Konfigurowanie narzędzia
W module 2 poznasz podstawowe pojęcia i procedury związane z konfiguracją chwytaka zamontowanego w m…
20min
3. Typy ruchu i poruszania się
W module 3 dowiesz się o różnych rodzajach ruchów robota i o tym, jak poruszać robotem w środowisku…
8min

4. Tworzenie programu
W module 4 wykorzystasz to, czego nauczyłeś się o ruchu i typach ruchu w module 3, aby rozpocząć two…
15min

5. Wybieranie i umieszczanie
W module 5 dodasz polecenia do obsługi danych wejściowych z czujnika, obsługi chwytaka i zmiany ładu…
11min
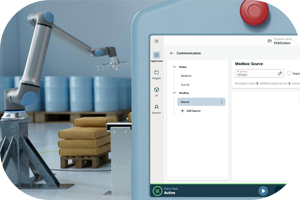
6. Komunikacja między robotami
W tym module dowiesz się, jak skonfigurować komunikację między dwoma robotami, aby umożliwić zsynchr…
8min

7. Już wkrótce!
Już wkrótce!

8. Już wkrótce!
Już wkrótce!
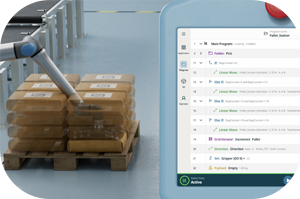
9. Paletyzacja
W tym module nauczysz się, jak tworzyć siatkę palet oraz używać iteratora siatki do obliczania położ…
12min

Gratulacje!
Ukończyłeś wszystkie moduły z tej ścieżki e-szkoleniowej. Może warto rozpocząć kolejną ścieżkę lub wziąć udział w szkoleniu na miejscu?
Dowiedz się więcej, uczestnicząc w jednym z naszych szkoleńPrzejdź do zestawienia bezpłatnych kursów e-Learning