닫기 
Choose your language

단계
2 /
7
셀 레이아웃 및 접근성 테스트
팔레트타이징 스테이션에 어떤 로봇이 필요합니까? 그리고 팔레트와 로봇은 어디에 배치합니까? 로봇이 모든 팔레트 위치에 도달할 수 있도록 어떻게 보장합니까?
이 단계에서는 자체 팔레트타이징 스테이션의 첫 번째 초안을 생성할 수 있도록 셀 레이아웃의 모범 사례를 배웁니다.
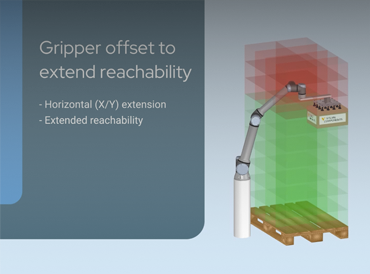
또한 시뮬레이션 도구에서 접근성 테스트를 수행하여 로봇이 팔레트의 모든 레이어와 위치에 도달할 수 있는지, 로봇이 물체와 충돌하지 않는지 확인하는 방법을 배웁니다. 접근성 테스트는 또한 어떤 종류의 그리퍼가 필요한지, 그리고 7번째 축이 필요한지 여부를 결정하는 데 도움이 됩니다.
단계 목표
- 팔레트타이징 스테이션의 첫 번째 초안 생성
- 접근성 테스트를 수행하여 로봇이 모든 레이어와 위치에 도달할 수 있는지 확인
모듈
완료
진행 중
시작하지 않음
곧 출시

 연습
연습
주제
- 레이아웃 디자인
- 팔레트 포지셔닝
- 로봇 장착
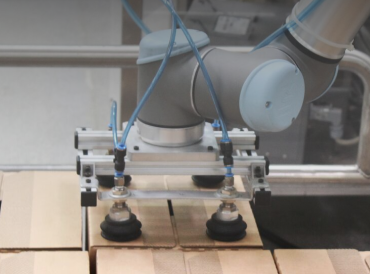
- 그리퍼 장착
완료
진행 중
시작하지 않음
곧 출시
주제
- 모든 직책의 접근성
- 충돌 감지
- 7번째 축의 필요성
 실습
실습
관련 링크

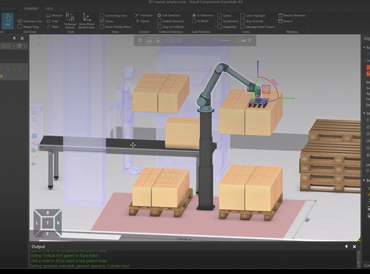
시각적 구성요소 시뮬레이션 소프트웨어 
시각적 구성요소는 레이아웃을 설계, 계획 및 시뮬레이션하는 데 사용되는 시뮬레이션 소프트웨어입니다. 컨베이어 벨트, CNC 기계, UR 로봇, 로봇 툴 등을 포함한 다양한 구성 요소를 3D 환경으로 끌어다 놓기만 하면 디지털 카탈로그에서 쉽게 삽입할 수 있습니다.
RoboDK 시뮬레이터
RoboDK는 산업용 로봇 및 로봇 프로그래밍을 위해 설계된 시뮬레이터입니다. 이를 통해 생산 환경 외부에서 로봇을 프로그래밍하고 다양한 애플리케이션을 시뮬레이션하기 위한 가상 환경을 만들 수 있습니다.
Robotiq 팔레트타이징 구성 장치
Robotiq 팔레트타이징 구성 장치는 Robotiq 팔레트타이징 설루션을 사용하여 사전 정의된 셀 레이아웃을 제공합니다. 또한 특정 매개변수를 조정하고 호환성을 확인할 수 있습니다.
Rocketfarm 시뮬레이터
팔레트타이징 로봇을 관리하기 위한 최고의 플랫폼은 MyRobot.cloud입니다. 디지털 트윈 기술과 당사의 소프트웨어인 Pally를 사용하여 실제 시나리오를 시뮬레이션, 분석 및 예측할 수 있습니다. 이 접근 방식은 불확실성을 줄이고 로봇 투자와 관련된 위험을 최소화합니다. 원활한 로봇 여행을 위해 Pally가 제공하는 편리함과 효율성에 대해 알아보십시오.
목표 확인
이 단계의 모든 목표에 도달했는지, 계속 진행하는 데 필요한 모든 것이 있는지 확인합니다.
다음 단계 :
3. 그리퍼 선택 및 테스트
팔레트타이징 스테이션의 레이아웃을 완성하고 접근성 테스트를 수행했으면 다음 단계는 팔레트타이징할 재료와 잘 작동하는 그리퍼를 선택하는 것입니다.
이 단계에서는 다양한 그립 시스템이 어떻게 작동하는지, 어떤 재료에 적합한지, 그리퍼에 투자하기 전에 그립 테스트를 수행하는 것이 필수적인 이유에 대해 배웁니다.