닫기 
Choose your language

비디오 튜토리얼
유니버설 로봇 제품 사용을 시작하는 데 도움이 되도록 설계된 단계별 프로그래밍 예제와 튜토리얼을 살펴보세요.
UR 로봇 프로그래밍을 위한 필수 사항에 대해 배우고 싶다면, 무료 e-러닝 섹션에서 UR20/30, e-Series 및 CB3 로봇에 대한 인터랙티브 이러닝을 찾습니다.

1 UR Studio에서 프로젝트 시작하기
템플릿이나 사용자 지정 설정을 사용하여 UR Studio에서 로봇 프로그래밍 프로젝트를 만들고, 열고, 저장하고, 관리하는 방법을 알아보세요.
 1분 21초
1분 21초


2 UR Studio에서 스테이션 탐색하기
팬, 궤도, 이동 및 회전 도구를 사용하여 UR Studio에서 스테이션 보기 및 로봇 개체를 탐색하고 조작하는 방법을 알아보세요.
1분 55초

3 UR Studio 카탈로그로 작업 셀 만들기
카탈로그를 사용하여 스탠드, 컨베이어, 팔레트 및 팔 끝 도구와 같은 구성 요소를 추가하여 UR Studio에서 로봇 작업 셀을 빠르게 구축하는 방법을 알아보세요.
1분 47초

4 UR Studio의 충돌 감지
UR Studio가 로봇 작업 셀 설정에서 충돌을 강조하여 안전하고 정확한 레이아웃 설계를 보장하는 방법을 알아보세요.
0분 40초

5 UR Studio에서 로봇 접근성 테스트
UR Studio에서 로봇 도달성을 평가하여 작업 셀 레이아웃에 적합한 최적의 로봇 모델을 선택하는 방법을 알아보세요.
1분 29초

6 센서로 컨베이어 제어 자동화
상자가 감지되면 움직임을 중지하기 위해 센서와 신호 연결을 사용하여 UR Studio에서 컨베이어 동작을 자동화하는 방법을 확인하십시오.
1분 18초

7 UR Studio로 3D 모델 가져오기
GLB 또는 GLTF 형식을 사용하여 액세서리, 공작물 또는 단종 도구로 사용자 정의 3D 모델을 UR Studio로 가져오는 방법을 알아보세요.
0분 48초

8 UR Studio로 사용자 지정 공작물 가져오기
정확한 시뮬레이션을 위한 스케일링 및 포지셔닝을 포함하여 UR Studio에서 외부 3D 모델을 공작물로 가져오고 구성하는 방법을 알아보십시오.
1분 11초

9 UR Studio에서 단종 도구 가져오기 및 구성
충돌 조정 및 그리퍼 존 설정을 포함하여 UR Studio에서 사용자 정의 팔 끝 도구를 가져오고 배치하고 구성하는 방법을 알아보세요.
1분 24초

10 UR Studio에 UR 캡 패키지 설치
향상된 기능을 위해 프런트 엔드 확장을 지원하는 UR Studio에서 URCap 패키지를 업로드, 설치 및 관리하는 방법을 알아보세요.
1분 03초

11 섀도우 프로그래밍으로 직접 포인트를 가르치세요
로봇을 수동으로 조깅하지 않고도 그림자 프로그래밍을 사용하여 UR Studio에서 로봇의 움직임을 빠르게 가르치는 방법을 알아보세요.
1분 06초
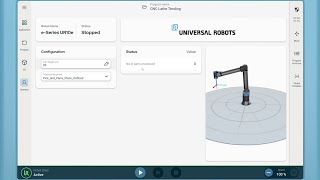
1 PolyScope X의 GUI 소개
이 모듈에서는 PolyScope X의 새로운 GUI와 이를 어디에서 찾을 수 있는지를 살펴보겠습니다.다음 모듈에서는 기능에 대해 자세히 살펴보겠습니다.
2분 35초
2 마법사를 사용하여 도구 구성하기
마법사를 사용하여 페이로드, 무게 중심(CoG), 도구 중심점(TCP) 및 도구의 방향을 구성하는 방법을 알아보고 도구의 I/O를 구성하는 위치를 알아보세요.
3분 28초

3 간단한 픽 앤 플레이스 프로그램 만드는 방법
이 동영상에서는 PolyScope X를 사용하여 간단한 픽 앤 플레이스 프로그램을 만드는 방법을 보여드립니다.
3분 27초
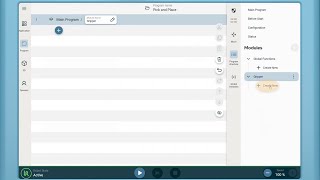
4 모듈 및 함수를 사용하여 프로그램의 가독성 및 재사용성 높이기
모듈과 함수를 만드는 방법을 알아보세요. 이렇게 하면 프로그램의 가독성이 향상되고 다른 방식으로 쉽게 재사용할 수 있습니다.
2분 49초
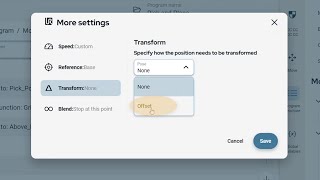
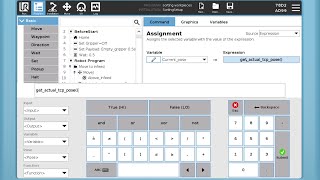
5 오프셋으로 위치를 변환하여 웨이포인트 수 최소화하기
사용자 정의 오프셋을 사용하여 웨이포인트를 변환하는 방법을 알아보세요. 이렇게 하면 프로그램에서 필요한 웨이포인트의 수를 최소화할 수 있으므로 프로그래밍하기 유용합니다.
2분 18초

6 애플리케이션에서 그리드 만들기
필요한 웨이포인트 수를 최소화하기 위해 PolyScope X에서 그리드 기능을 사용하는 방법을 알아보세요. (PolyScope 5의 팔레트화 마법사의 기본 레이아웃과 유사합니다.)
2분 27초
7 그리드, 모듈 및 함수, 트랜스폼을 사용한 간단한 CNC 애플리케이션
이 모듈에서는 기능: 모듈 및 함수, 그리드, 오프셋을 사용한 트랜스폼은 간단한 CNC 애플리케이션을 구축하는 데 사용됩니다.
3분 21초
8 운영자 화면의 8가지 기능
운영자 화면을 설정하는 방법을 알아보세요. 운영자가 입력 변수 및 선택 항목에 액세스할 수 있도록 설정하는 방법과 운영자 화면에 애플리케이션 값을 직접 표시하는 방법을 알아보세요.
3분 45초

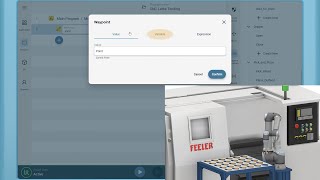
9 CNC 선반 기계 템플릿에 대한 간단한 안내
CNC 선반 기계 애플리케이션에 대한 템플릿의 간단한 안내를 참조하세요. 주요 웨이포인트를 티칭하고, I/O로 CNC 기계 연결을 구성하고, 몇 가지 조정을 하면 바로 사용할 수…
1분 26초
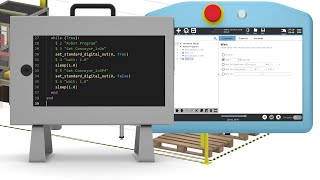
1 URScript 소개
URScript에 대한 소개입니다. 가장 일반적인 함수를 어디에서 찾을 수 있는지, 그리고 URScript가 백그라운드에서 어떻게 사용되는지 알아보세요.
VSCode 편집기에서 U…
7분 46초

2 시스템 실행 아키텍처
“무엇이 어디로 가는가"에 대한 설명을 제공하기 위한 URScript의 시스템 실행 아키텍처 개요 https://www.universal-robots.com/articles/ur/…
8분 54초
3 노드를 URScript로 변환
프로그램을 URScript로 변환하는 방법에 대한 간단한 안내입니다. URScript로 오프라인 프로그래밍을 시작하는 방법에 대한 기본적인 이해를 제공합니다.
3분 33초
4 대시보드 서버
TCP/IP 소켓 연결(https://docs.universal-robots.com/tutorials/urscript-tutorials/socket-communication.htm…
4분 09초
5 인터페이스 및 원격 URScript
PolyScope 5의 다양한 통신 인터페이스 https://www.universal-robots.com/products/ur-developer-suite/communication…
7분 15초
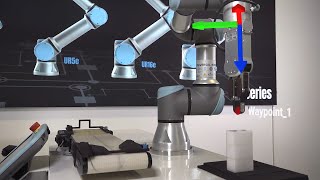
툴 구성: TCP, 자세, 페이로드 및 무게중심
해당 튜토리얼은 툴/엔드 이펙터를 구성하는 모든 단계에 대해 설명합니다.
4분 33초

유니버설 로봇을 사용하여 머신 텐딩을 수행하는 방법 알아보기
“온라인 교육”의 “e-시리즈 애플리케이션 과정”에서 당사의 새 머신 텐딩 모듈을 체험해 보세요. 여기에서 URsim에 대한 머신 텐딩 전체 프로그램을 다운로드할 수도 있습니다.
…
3분 05초

제한된 프리드라이브를 사용하여 프로그래밍 개선 및 속도 향상
5.8 버전의 폴리스코프부터 프리드라이브를 사용하면 직선 축 움직임 또는 회전 동작을 제한할 수 있기 때문에 보다 빠르고 간편하게 프로그래밍할 수 있습니다. 본 튜토리얼에는 4가지…
2분 40초

"시퀀스를 시작하기 전"으로 프로그램이 멈춘 후 충돌 예방
로봇 프로그램이 멈춰서 재시작했을 때 주변 환경과 충돌하는 것을 경험한 적이 있습니까? 이 튜토리얼에서 "시퀀스를 시작하기 전"으로 충돌을 예방하는 방법을 보여드립니다.
4분 59초
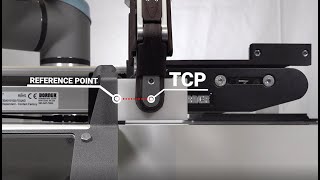
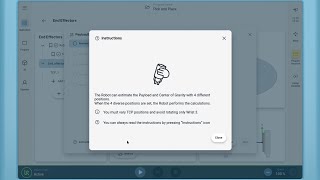
그리퍼만 사용하여 물체 치수 측정
그리퍼 및 레퍼런스 포인트만 사용하여 물체 치수를 측정하도록 로봇 프로그래밍하는 방법을 배웁니다 품질 검사 및 재고 관리에 매우 적합합니다.
5분 57초
물체를 감지하는 포스 센서 사용 방법
물체를 감지하는 포스 센서 사용 방법(방향 명령/툴에 닿을 때까지 이동)
3분 54초
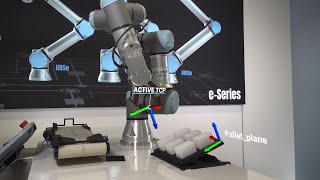
액티브 TCP를 기능으로 활성화하는 방법
이 비디오 튜토리얼에서 액티브 TCP를 기능으로 활성화하는 방법을 배웁니다.
1분 44초
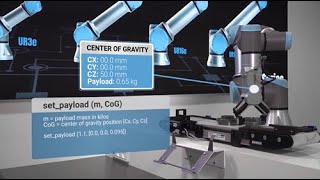
CB3: 프로그램 실행 중 페이로드 및 무게중심 변경 방법
이 비디오 튜토리얼에서 프로그램 실행 중 페이로드와 무게중심을 변경하는 방법을 배웁니다.
2분 42초

안전: 툴 방향 각도 제한
엔드오브암 툴의 각도를 제한하여 애플리케이션을 보다 안전하게 만드는 방법에 대해 알아보십시오.
3분 44초

안전: 조인트 제한 및 속도 설정
각 개별 로봇 조인트의 운동 범위 및 속도를 제한하는 방법 알아보기
2분 47초

안전: 안전 평면 구성 및 생성
안전 평면을 구성하고 생성하는 방법에 대해 알아보세요. 정상 모드, 감소 모드, 또는 둘 다 적용되는 모드에서 평면을 구성할 수 있으며 로봇이 평면을 넘어서 이동하지 못하도록 합니…
2분 00초

1 Unboxing
2분 10초

2 Hardware Installation
3분 16초

3 Software Setup
0분 41초

4 Calibration
1분 36초