닫기 
Choose your language

e-시리즈 핵심 과정
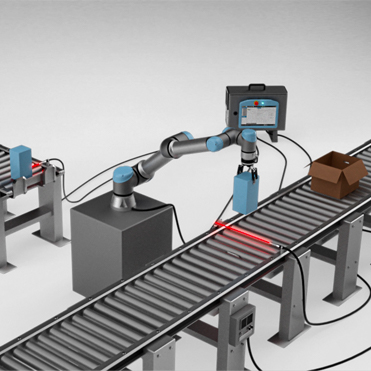
핵심 경로는 UR 로봇을 작동하는 데 필요한 모든 필수 개념, 용어 및 프로그래밍 명령을 설명합니다. 8개의 모듈은 완벽한 픽앤플레이스 애플리케이션을 설정하고 프로그래밍하는 단계별 시뮬레이션입니다.
추천 브라우저 및 설정. E-러닝 모듈을 보기 위해 마이크로소프트 엣지 또는 구글 크롬 최신 버전을 사용하실 것을 추천합니다. 자바 스크립트가 활성화되어 있어야 합니다.
모듈
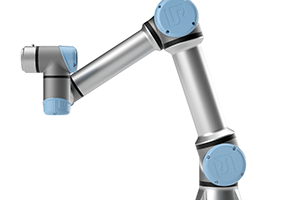
1. 첫 만남: 로봇 살펴보기
이 모듈은 로봇, 사용자 인터페이스, I/O 및 기능에 관한 간략한 소개를 제공합니다.
 7분
7분

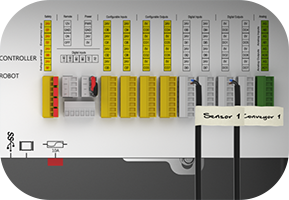
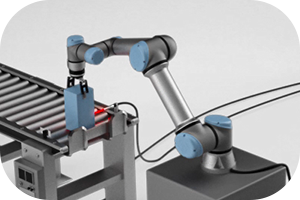
2. 로봇 작업 준비 중
이 모듈에서는 엔드이펙터를 연결하고 센서와 컨베이어를 연결 및 구성하여 픽앤플레이스 작업을 위한 로봇을 준비합니다.
6분

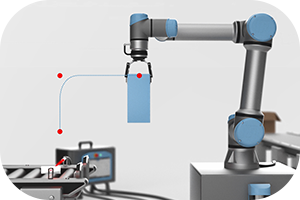
3. 툴 설정
도구 중심점의 확인 및 구성 방법, 도구 방향 티칭 방법, 무게 중심 및 유효 하중 티칭 방법에 대해 배워보세요. 모듈이 끝나면 모듈 2에서 준비된 픽앤플레이스 애플리케이션에 대한…
17분
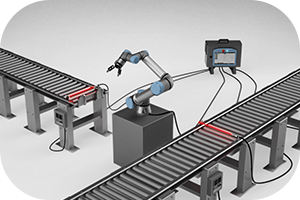
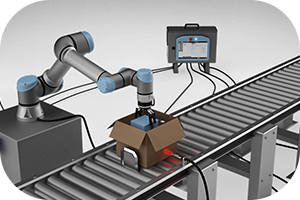
4. 프로그램 만들기
이 모듈에서는 로봇의 다양한 모션 유형을 학습하고 픽앤플레이스 애플리케이션에 필요한 모든 모션과 웨이포인트를 프로그래밍합니다.
12분
5. 외부 장치와의 상호작용
이 모듈에서는 그리퍼를 작동하는 방법, 센서와 상호 작용하는 방법, 설정 및 대기 명령을 사용하여 유효 하중을 변경하는 방법을 학습합니다. 마지막으로 픽앤플레이스 애플리케이션에 필…
11분
6. 컨트롤 컨베이어
이 모듈에서는, 스레드를 이용해 컨베이어를 제어하는 방법을 학습합니다.
10분
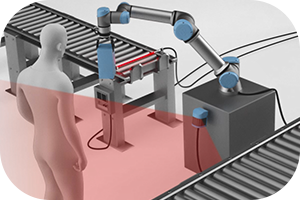
7. 안전 설정
이 모듈에서는 픽앤플레이스 애플리케이션에 다양한 안전 설정을 적용하는 방법을 학습합니다.
- 안전 스캐너를 사용하여 감소 모드를 작동하는 방법.
- 안전 스캐너를 사용하여 안전장치…
15분
8. 최적화
이 모듈에서는 해당 웨이포인트에 혼합 반지름을 추가하고 속도 및 가속도를 조정하여 픽앤플레이스 애플리케이션을 최적화하는 방법을 학습합니다.
6분