닫기 
Choose your language

e-시리즈 전문가 과정
전문 경로는 핵심 경로에서 배운 기술을 기초로 하지만 더 복잡한 설정을 설명합니다. UR 로봇 작동 방법을 아직 모르는 경우, 전문 경로를 시작하기 전에 핵심 경로 모듈을 완료하실 것을 강력히 권장합니다.
추천 브라우저 및 설정. E-러닝 모듈을 보기 위해 마이크로소프트 엣지 또는 구글 크롬 최신 버전을 사용하실 것을 추천합니다. 자바 스크립트가 활성화되어 있어야 합니다.
모듈
9. 프로그램 플로우
이 모듈에서는 변수 및 if문을 사용하여 고급 비선형 프로그램 흐름을 만드는 방법을 학습합니다.
 16분
16분

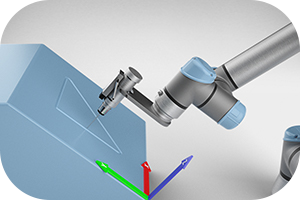
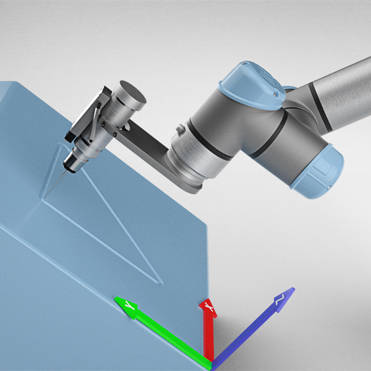
10. 특징 좌표
이 모듈에서는 사용자 정의 좌표계 생성 방법, 좌표계를 기준으로 웨이포인트를 프로그래밍하는 방법, 다른 좌표계에서 로봇을 움직이는 방법을 학습합니다.
13분
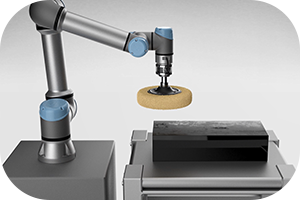
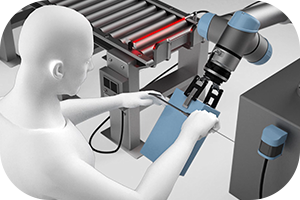
11. 동력 제어
이 수업에서는 여러 방향에서 힘을 가하기 위한 로봇의 동력 템플릿의 사용법을 배울 수 있습니다. 동력 기능은 폴리싱, 디버링, 조립과 같은 많은 어플리케이션에서 매우 유용합니다.
12분