閉じる 
Choose your language

UR20/30 eラーニング
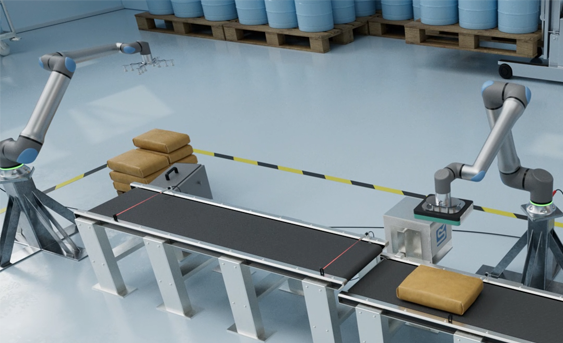
オートメーションの世界に足を踏み入れ、生産現場で監督のブライアンと一緒に、没入型トレーニング体験を通じて実践的なスキルを学びましょう。このトレーニングでは、現場を想定したさまざまなタスクに実際に挑戦できます。それぞれのタスクで、ブライアンがUR20ロボットの設定とプログラミングの方法をステップごとに説明します。
ユニバーサルロボット製品を初めてお使いの方にぴったりなトレーニングです。
注記:コンテンツは英語のみ。
推奨ブラウザ設定。 E ラーニングモジュールを表示するには、最新バージョンのMicrosoft EdgeまたはGoogle Chromeを使用することをお勧めします。JavaScript を有効にする必要があります。
モジュール

1.ハードウェアの概要と設定
モジュール1では、まず、ロボットのハードウェアとソフトウェアの概要を説明します。次に、エンドエフェクタを取り付け、コントロールボックスにデバイスを接続して、ロボットがタスクを実行できるように準備します…
 15分
15分


2.ツールを構成する
モジュール2では、モジュール1で取り付けたグリッパーの構成に関連する重要な概念と手順を学びます。その後、新しく習得したスキルを使用してグリッパーを構成します。
20分
3.移動と運動の種類
モジュール3では、ロボットのさまざまな運動の種類と、移動画面からロボットを移動させる方法について学びます。
8分

4.プログラムを作成する
モジュール4では、モジュール3で学んだ移動と運動の種類を使用して、バッグをパレットからコンベアに移動するプログラムを構築します。
17分

5.ピッキングと配置
モジュール5では、センサーからの入力を処理し、グリッパーを操作し、荷重設定を変更するためのコマンドを追加します。
また、ウェイポイントに「Move until」(指定条件まで移動)コマンドを追加する方…
11分

6.ロボット間通信
このモジュールでは、同期操作を可能にするために2台のロボット間の通信を設定する方法を学びます。
8分

7.コンベア制御
モジュール7では、センサー入力とラベリングロボットからのレジスタデータを組み合わせた条件文を使用してコンベアを制御する方法を学びます。
11分

8. 力制御(フォースコントロール)
このモジュールでは、ロボットの力制御(フォースコントロール)
機能を使用してラベルを正確に貼り付ける方法に焦点を当てています。力とトルクの両方の設定を構成して、各ラベルが正しく接着されるようにします。
12分

9. パレタイジング
このモジュールでは、ソフトウェアのパレタイジングテンプレートを使用してバッグをパレットに積み込む方法を学習します。
10分

10.生産に向けた準備
このモジュールでは、コントロールパネルを接続し、ロボットをリモートコントロール用に構成して、ロボットを生産に向けて準備します。
10分

おめでとうございます!
このeラーニングトラックでの全てのモジュールを完了しました。次のコースの受講や、対面式のトレーニングに参加してみませんか?
トレーニングコースへ参加し詳細を確認する無料eラーニングの概要