閉じる 
Choose your language

ステージ
2 /
7
セルレイアウトと到達性テスト
パレタイジングステーションに必要なロボットは?パレットとロボットはどこに置くか?ロボットがすべてのパレット位置に到達できるようにするにはどうすればよいか?
このステップでは、セルレイアウトの最良事例を学び、自分自身のパレタイジングステーションの原案を作成できるようにします。
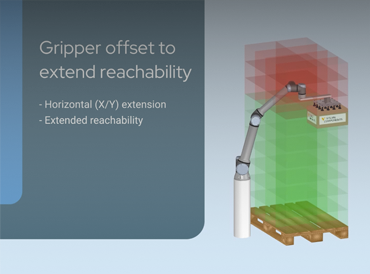
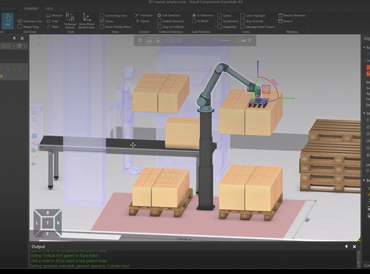
また、シミュレーションツールで到達性テストを実行し、ロボットがパレット上のすべてのレイヤーと位置に到達できること、およびロボットが物に衝突しないことを検証する方法も学びます。到達性テストは、どの種類のグリッパーが必要か、第7軸が必要かどうかを判断するのにも役立ちます。
ステージの目標
- パレタイジングステーションの原案作成
- ロボットがすべてのレイヤーと位置に到達できることを検証するために到達性テストを実施します。
モジュール
完了
進行中
新規
近日公開

 ウォークスルー
ウォークスルー
主要科目
- レイアウト設計
- パレットの位置決め
- ロボットの設置
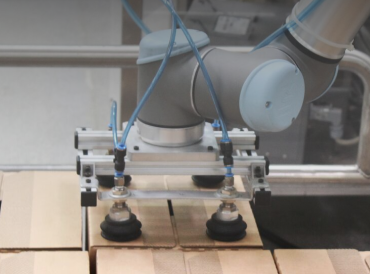
- グリッパーの取り付け
完了
進行中
新規
近日公開
主要科目
- 全ての位置の到達可能性
- 衝突の検出
- 第7軸の必要性
 ハンズオン
ハンズオン
関連リンク

Visual Components シミュレーションソフトウェア 
Visual Componentsは、レイアウトの設計、計画、シミュレーションに使用するシミュレーションソフトウェアです。コンベアベルト、CNCマシン、URロボット、ロボットツールなどのさまざまなコンポーネントを、デジタルカタログからドラッグ&ドロップするだけで簡単に3D環境を構築できます。
RoboDKシミュレータ
RoboDKは産業用ロボットとロボットプログラムのために設計されたシミュレータです。生産環境の外でロボットプログラムを作成し、さまざまなアプリケーションをシミュレーションするための仮想環境を構築できます。
Robotiqパレタイジングコンフィギュレーター
Robotiqパレタイジングコンフィギュレーターでは、Robotiqパレタイジングソリューションを使用したセルレイアウトを事前に定義します。また、特定のパラメーターを微調整したり、互換性を確認することもできます。
Rocketfarmシミュレータ
パレタイジングロボットを管理するための究極のプラットフォームがMyRobot.cloudです。デジタルツインテクノロジーと当社のソフトウェアであるPallyを使用すると、現実のシナリオをシミュレーション、分析、予測できます。このアプローチにより、不確実性を減らし、ロボット投資に伴うリスクを最小限に抑えます。Pallyが提供するシームレスなロボット工学の旅の利便性と効率性に身を投じましょう。
目標チェック
このステージの目標をすべて達成し、次に進むために必要なものがすべて揃っているかどうかを確認します。
次のステージ :
3. グリッパーの選択とテスト
パレタイジングステーションのレイアウトを確定して到達性テストを実施したら、次のステップはパレタイズする材料と相性の良いグリッパーを選択することです。
このステージでは、さまざまなグリッピングシステムがどのように機能するのか、どの素材に適しているのか、そしてグリッパーに投資する前にグリッパーのテストを行うことがなぜ不可欠なのかを学びます。