閉じる 
Choose your language

ビデオチュートリアル
ユニバーサルロボッツ製品を使い始めるのに役立つ、段階的なプログラミング例とチュートリアルをご覧ください。
URロボットの基本プログラミングを学習されたい方は、UR20/30, eシリーズとCB3ロボットの両方のインタラクティブなeラーニングが揃った「無料のeラーニング」セクションをご確認ください。

1 UR Studioでプロジェクトを始める
テンプレートやカスタム設定を使用して、UR Studioでロボットプログラミングプロジェクトを作成、開く、保存、管理する方法を学びます。
 1分21秒
1分21秒


2 UR Studioで駅をナビゲートする
パン、軌道、移動、回転ツールを使用して、UR Studioでステーションビューとロボットオブジェクトをナビゲートおよび操作する方法をご覧ください。
1分55秒

3 UR Studioカタログを使用して作業セルを構築する
カタログを使用してスタンド、コンベア、パレット、エンドオブアームツールなどのコンポーネントを追加することで、UR Studioでロボット作業セルをすばやく構築する方法を学びます。
1分47秒

4 UR Studioでの衝突検出
安全で正確なレイアウトデザインを確保するために、UR Studioがロボット作業セル設定で衝突を強調表示する方法をご覧ください。
0分40秒

5 UR Studioでのロボットの到達可能性のテスト
UR Studioでロボットの到達可能性を評価し、作業セルレイアウトに最適なロボットモデルを選択する方法を学びます。
1分29秒

6 センサーによるコンベア制御の自動化
センサーと信号接続を使用してUR Studioでコンベアの動作を自動化し、ボックスが検出されたときに移動を停止する方法をご覧ください。
1分18秒

7 UR Studioへの3 Dモデルのインポート
GLBまたはGLTFフォーマットを使用して、カスタム3 Dモデルをアクセサリー、ワーク、またはエンドオブアームツールとしてUR Studioにインポートする方法を学びます。
0分48秒

8 カスタムワークをUR Studioにインポートする
正確なシミュレーションのためのスケーリングや位置決めなど、UR Studioで外部3 Dモデルをワークとしてインポートして構成する方法を学びます。
1分11秒

9 UR Studioでのエンドオブアームツールのインポートと設定
衝突調整やグリッパーゾーンの設定など、UR Studioでカスタムエンドオブアームツールをインポート、配置、設定する方法について説明します。
1分24秒

10 UR StudioへのUR Capパッケージのインストール
UR StudioでURCapパッケージをアップロード、インストール、管理する方法を学び、機能強化のためのフロントエンド拡張機能をサポートします。
1分03秒

11 シャドウプログラミングでポイントを直接教える
手動でジョギングすることなく、シャドウプログラミングを使用してUR Studioでロボットの動きをすばやく教える方法をご覧ください。
1分06秒
1 PolyScope X の GUI の紹介
このモジュールでは、PolyScope X の真新しい GUI と、どこに何があるのかをご紹介します。次のモジュールでは、機能性をより深く掘り下げていきます。
2分35秒
2 ウィザードを使用したツールの設定
ウィザードを使用して、ペイロード、重心(CoG)、ツール・センター・ポイント(TCP)、ツールの向きを設定し、ツールのI/Oを設定する方法をご覧ください。
3分28秒

3 シンプルなピック&プレース・プログラムの作り方
このビデオでは、PolyScope Xを使った簡単なPick and Placeプログラムの作り方をご紹介します。
3分27秒
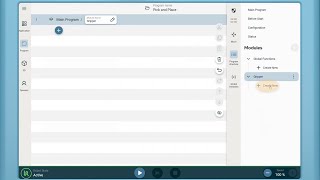
4 モジュールと関数を使用してプログラムの可読性と再利用性を高める
モジュールと関数の作り方を学びましょう。こうすることで、プログラムの可読性が向上し、パラメータを変えて再利用するのが簡単になります。
2分49秒
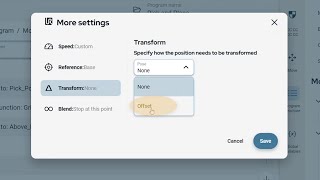
5 オフセットを使って位置を変換し、ウェイポイントの数を最小限に抑える
ユーザー定義のオフセットを使用してウェイポイントを変換する方法を学びます。これにより、プログラム内で必要なウェイポイントの数を最小限に抑えることができます。
2分18秒

6 アプリケーションにグリッドを作る
ポリスコープ X のグリッド機能を使って、必要なウェイポイントの数を最小限に抑える方法をご紹介します。(PolyScope 5 のパレタイジングウィザードのベースレイアウトに似ています)。
2分27秒
7 グリッド、モジュールと関数、トランスフォームを使った簡単なCNCアプリケーション
このモジュールでは モジュールとファンクション、グリッド、オフセット付きトランスフォームを使用して、簡単なCNCアプリケーションを構築します。
3分21秒
8 オペレーター画面の特徴
オペレータ画面の設定方法を学ぶ。入力変数と選択項目をオペレータがアクセスできるようにする方法、およびアプリケーションの値をオペレータ画面に直接表示する方法。
3分45秒

9 CNC旋盤機械テンプレートの短いウォークスルー
CNC旋盤アプリケーションのテンプレートの短いウォークスルーをご覧ください。キーとなるウェイポイントを教え、I/OでCNCマシンの接続を設定し、いくつかの調整を行えば完成です。詳しくは、www.uni…
1分26秒
1 URScript入門
URScriptをすでに使っている場所を紹介します。最も一般的な関数はどこにあるのか、URScriptは裏でどのように並べられているのか。
VSCodeエディタでURScriptを書くには、https…
7分46秒

2 システム実行アーキテクチャ
URScriptのシステム実行アーキテクチャの概要、「What goes where 」の説明 https://www.universal-robots.com/articles/ur/urplus-…
8分54秒
3 ノードからURScriptへの変換
プログラムをURScriptに変換する簡単なウォークスルーです。URScriptでオフラインプログラミングを始めるための基本的な理解ができます。
3分33秒
4 ダッシュボード・サーバー
TCP/IP ソケット接続 https://docs.universal-robots.com/tutorials/urscript-tutorials/socket-communication.ht…
4分09秒
5 インターフェースとリモート URScript
PolyScope 5 のさまざまな通信インターフェース https://www.universal-robots.com/products/ur-developer-suite/communicat…
7分15秒
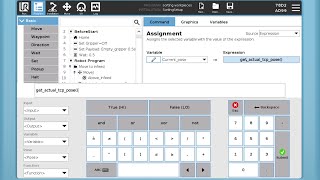
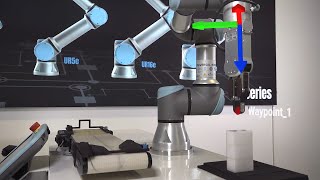
ツールの構成:TCP、方向、有効荷重、重心
このチュートリアルでは、ツール/エンドエフェクタを構成する手順をすべて説明します
4分33秒

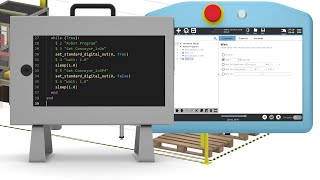
ユニバーサルロボットを使用してマシンテンディングを行う方法を学ぶ
「オンライントレーニング」の「eシリーズ応用レッスン」にある新しいマシンテンディングのモジュールをお試しください。ここでは、URsimのマシンテンディングプログラム全体をダウンロードすることもできます…
3分05秒

制約付きフリードライブでプログラミングを素早く改善
Polyscopeのバージョン5.8からは、フリードライブの使用時にツール方向を固定したり、直線の動きに制限できるようになるため、プログラミングがこれまでより迅速かつ簡単になりました。このチュートリア…
2分40秒

「Before Start Sequence(シーケンスの開始前)」を利用してプログラム停止後の衝突を防ぐ
プログラムの停止後にロボットを再起動する際、ロボットが周囲と衝突するのを見たことはありますか?このチュートリアルでは、「Before Start Sequence(シーケンスの開始前)」を利用して衝突…
4分59秒
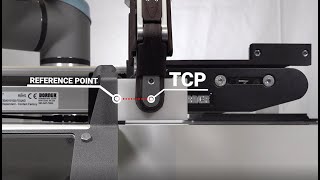
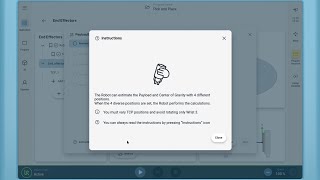
グリッパーのみを使用したオブジェクトの採寸
グリッパーと基準点のみを使用したオブジェクトの採寸をどのようにロボットにプログラミングしたらよいかについてご説明します。品質検査や仕分け作業に最適です。
5分57秒
フォースセンサーを用いたオブジェクトの検出方法
フォースセンサーを用いたオブジェクトの検出方法(方向コマンド/ツールが接触するまで移動させます)
3分54秒
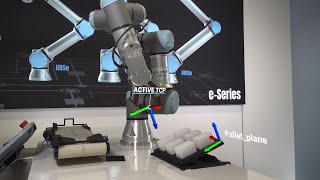
アクティブなTCPと機能を連携させる方法
このビデオチュートリアルでは、アクティブなTCPと機能の連携方法についてご説明します。
1分44秒
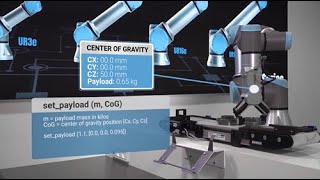
CB3: プログラムの実行中にペイロードと重心を変更する方法
このビデオチュートリアルでは、プログラムの実行中にペイロードと重心を変更する方法をご説明します。
2分42秒

安全:ツールの方向の制限
ツールを向ける角度を制限し、アプリケーションをより安全にする方法を学びましょう。
3分44秒

安全:動作範囲と最大速度の設定
各ジョイントの動作範囲と最大速度を設定する方法について学びましょう
2分47秒

安全性:安全面の作成および構成
安全面の作成方法および構成方法を学びます。この平面を使用すると、ロボットが通常モード、縮小モード、またはその両方で平面を超えて移動するのを防ぐことができたり、縮小モードを始動させたりできます。
2分00秒

1 Unboxing
2分10秒

2 Hardware Installation
3分16秒

3 Software Setup
0分41秒

4 Calibration
1分36秒