閉じる 
Choose your language

e-Series基礎レッスン
基礎レッスンでは、重要なコンセプト、用語、URロボットの操作に必要なプログラミングコマンドを学ぶことができます。8つのモジュールを通して、ピック・アンド・プレイス・アプリケーションの構築やプログラミングを段階的について学ぶことができます。
推奨ブラウザ設定。 E ラーニングモジュールを表示するには、最新バージョンのMicrosoft EdgeまたはGoogle Chromeを使用することをお勧めします。JavaScript を有効にする必要があります。
モジュール
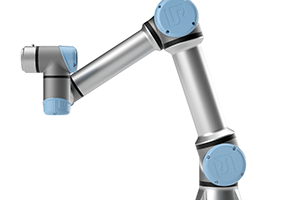
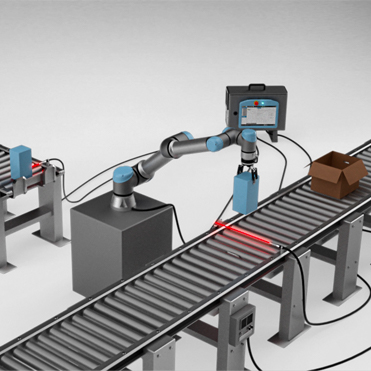
1. 見てみましょう:ロボットの全体像
このモジュールでは、ロボット、ユーザーインターフェース、I/O、および機能について簡単に説明します。
 7分
7分

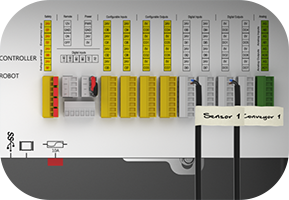
2. ロボットのタスクを準備する
このモジュールでは、エンドエフェクタに接続し、その後センサーとコンベアーを接続、設定し、ロボットのピック・アンド・プレイス作業の準備を行います。
6分

3. ツールの設定
ツールセンターポイントの検出および設定方法、ツールオリエンテーションの教え方、重力やペイロードの中心の教え方について学習します。モジュールの最後では、モジュール2で準備したピック・アンド・プレイス・ア…
17分
4. プログラムを作成する
このモジュールでは、ロボットの様々な運動の種類を学習します。そのあとに、ピック・アンド・プレイス・アプリケーションに必要な、すべての運動とウェイポイントをプログラムします。
12分
5. 外部デバイスとの対話
このモジュールでは、グリッパーの操作方法、センサーとの連動方法、設定および待機コマンドを使用したペイロードの変更方法について学習します。では、ピック・アンド・プレイス・アプリケーションに必要な設定およ…
11分
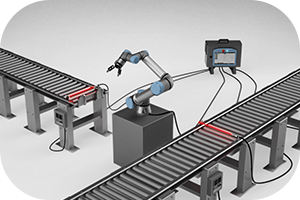
6. コンベヤーの制御
このモジュールでは、スレッドを使用してコンベヤーを制御する方法を学習します。
10分
7. 安全設定
このモジュールでは、ピック・アンド・プレイス・アプリケーションでの様々な安全設定の適用方法について学習します。
- 安全スキャナーを使用した減少モードの始動方法
- 安全スキャナーを使用した予防停止の…
15分
8. 最適化
このモジュールでは、ブレンド半径を適切なウェイポイントに追加して速度と加速を調整することで、ピック・アンド・プレイス・アプリケーションを最適化する方法について学習します。
6分