Fermer 
Choose your language

Tutoriels vidéo
Découvrez des exemples de programmation étape par étape et des tutoriels conçus pour vous aider à vous familiariser avec les produits Universal Robots.
Si vous voulez apprendre les bases de la programmation d’un robot UR, consultez la section Formation en ligne gratuite où vous trouverez un apprentissage interactif en ligne pour les robots UR20/30, e-Series et CB3.

1 Premiers pas avec les projets dans UR Studio
Découvrez comment créer, ouvrir, enregistrer et gérer des projets de programmation de robots dans UR…
 1 mn 21 s
1 mn 21 s


2 Navigation dans la station dans UR Studio
Découvrez comment naviguer et manipuler la vue de la station et les objets robotisés dans UR Studio…
1 mn 55 s

3 Construire votre cellule de travail avec le catalogue UR Studio
Apprenez à construire rapidement une cellule de travail robotisée dans UR Studio en ajoutant des com…
1 mn 47 s

4 Détection de collision dans UR Studio
Découvrez comment UR Studio met en évidence les collisions dans la configuration de votre cellule de…
0 mn 40 s

5 Test de l'accessibilité du robot dans UR Studio
Apprenez à évaluer l'accessibilité du robot dans UR Studio pour choisir le modèle de robot optimal p…
1 mn 29 s

6 Automatisation de la commande du convoyeur avec un capteur
Découvrez comment automatiser le comportement du convoyeur dans UR Studio à l'aide de capteurs et de…
1 mn 18 s

7 Importer des modèles 3D dans UR Studio
Découvrez comment importer des modèles 3D personnalisés dans UR Studio en tant qu'accessoires, pièce…
0 mn 48 s

8 Importation de pièces personnalisées dans UR Studio
Découvrez comment importer et configurer des modèles 3D externes en tant que pièces dans UR Studio,…
1 mn 11 s

9 Importation et configuration des outils de fin de bras dans UR Studio
Découvrez comment importer, positionner et configurer des outils de fin de bras personnalisés dans U…
1 mn 24 s

10 Installation des packages UR Cap dans UR Studio
Découvrez comment télécharger, installer et gérer des packages URCap dans UR Studio, en prenant en c…
1 mn 03 s

11 Enseignez des points directement avec la programmation fantôme
Découvrez comment enseigner rapidement les mouvements du robot dans UR Studio en utilisant la progra…
1 mn 06 s
1 Introduction à l'interface graphique de PolyScope X
Dans ce module, vous verrez la toute nouvelle interface graphique du PolyScope X et où trouver quoi.…
2 mn 35 s
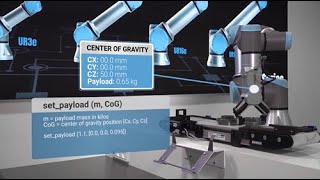
2 Configuration d'un outil avec l'assistant
Découvrez comment utiliser les assistants pour configurer la charge utile, le centre de gravité (CoG…
3 mn 28 s

3 Comment créer un programme simple de prélèvement et de placement ?
Dans cette vidéo, nous montrons comment créer un simple programme Pick and Place en utilisant PolySc…
3 mn 27 s
4 Utilisation des modules et des fonctions pour améliorer la lisibilité et la réutilisation de votre programme
Apprenez à créer des modules et des fonctions. Cela améliorera la lisibilité de votre programme et f…
2 mn 49 s
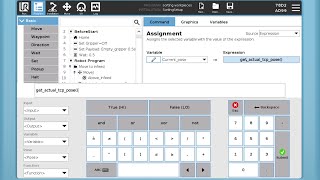
5 Transformer les positions avec des décalages pour minimiser le nombre de waypoints
Apprenez à transformer un waypoint en utilisant un décalage défini par l'utilisateur. Cela permet de…
2 mn 18 s

6 Créez une grille dans votre application
Apprenez à utiliser la fonction Grille dans PolyScope X, pour minimiser le nombre de waypoints néces…
2 mn 27 s
7 Une application CNC simple utilisant la grille, les modules et fonctions, et les transformations
Dans ce module, les fonctions : Modules et fonctions, grilles et transformation avec décalage sont u…
3 mn 21 s
8 Caractéristiques de l'écran de l'opérateur
Apprenez à configurer l'écran de l'opérateur. Comment rendre les variables d'entrée et les sélection…
3 mn 45 s

9 Brève présentation du modèle de tour CNC
Voir une brève présentation du modèle pour une application de tour CNC. Enseignez les points de pass…
1 mn 26 s
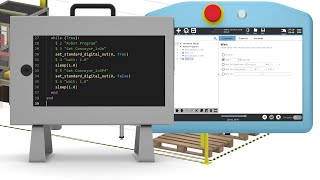
1 Introduction à URScript
Une introduction à ce que vous avez déjà utilisé avec URScript. Où trouver les fonctions les plus co…
7 mn 46 s

2 Architecture d'exécution du système
Vue d'ensemble de l'architecture d'exécution du système URScript, pour expliquer « ce qui va où » ht…
8 mn 54 s
3 Conversion de Node en URScript
Une démonstration simple de la façon dont un programme peut être converti en URScript. Cela permet d…
3 mn 33 s
4 Serveur Dashboard
Apprenez à utiliser une connexion TCP/IP Socket https://docs.universal-robots.com/tutorials/urscript…
4 mn 09 s
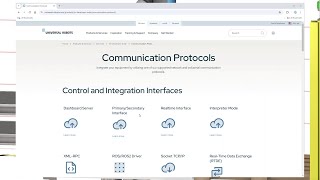
5 Interfaces et URScript à distance
Obtenez un aperçu des différentes interfaces de communication https://www.universal-robots.com/produ…
7 mn 15 s
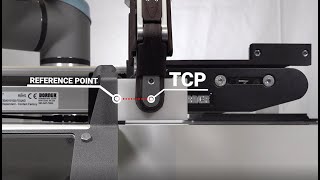
Configuration de l’outil : PCO, orientation, charge utile et centre de gravité
Ce tutoriel vous guide à travers toutes les étapes de la configuration d’un outil/effecteur d’extrém…
4 mn 33 s

Apprendre le chargement des machines avec Universal Robots
Essayez notre nouveau module sur le chargement des machines dans le « Cours d'application e-Series »…
3 mn 05 s

Améliorez et accélérez votre programmation grâce au verrouillage du fonctionnement libre
Depuis la version 5.8 de Polyscope, il est désormais possible de verrouiller la rotation ou le mouve…
2 mn 40 s

Prévenir les collisions après l’arrêt du programme grâce à une « séquence avant démarrage »
Avez-vous déjà vu votre robot entrer en collision avec son environnement lors de son redémarrage apr…
4 mn 59 s
Mesurer les dimensions d’un objet en utilisant uniquement une pince
Découvrez comment vous pouvez programmer le robot pour mesurer les dimensions des objets en utilisan…
5 mn 57 s
Comment utiliser le capteur de force pour détecter des objets
Comment utiliser le capteur de force pour détecter des objets (commande de direction/déplacement jus…
3 mn 54 s
Comment aligner le PCO actif sur une caractéristique
Dans ce tutoriel vidéo, vous apprendrez comment aligner le PCO actif sur une fonction.
1 mn 44 s
CB3: Comment changer la charge utile et le centre de gravité pendant l’exécution du programme
Dans ce tutoriel vidéo, vous apprendrez comment changer la charge utile et le centre de gravité pend…
2 mn 42 s

Sécurité : restreindre l'angle de direction de l'outil
Apprenez comment rendre votre application plus sûre en restreignant l'angle dans lequel l'outil de f…
3 mn 44 s

Sécurité : configurer les limites et la vitesse des articulations
Apprenez comment restreindre la plage de mouvement et la vitesse pour chaque articulation du robot i…
2 mn 47 s

Sécurité : créer et configurer des plans de sécurité
Apprenez à créer et à configurer des plans de sécurité. Ces plans peuvent empêcher le robot de se dé…
2 mn 00 s

1 Unboxing
2 mn 10 s

2 Hardware Installation
3 mn 16 s

3 Software Setup
0 mn 41 s

4 Calibration
1 mn 36 s