

Disposition des cellules et test d’accessibilité
De quel robot avez-vous besoin pour votre station de palettisation ? Et où placez-vous la ou les palettes et le robot ? Comment s’assurer que le robot est capable d’atteindre toutes les positions sur la palette ?
Dans cette étape, vous apprendrez les meilleures pratiques de disposition de cellules pour vous permettre de créer une première ébauche de votre propre station de palettisation.
Vous apprendrez également à effectuer un test d’accessibilité dans un outil de simulation pour vérifier que le robot peut atteindre toutes les couches et positions sur la palette et que le robot n’entre en collision avec aucun objet. Le test d’accessibilité vous aide également à déterminer le type de préhenseur dont vous avez besoin, et si vous avez besoin d’un 7e axe.
- Créer une première ébauche de station de palettisation
- Effectuer un test d’accessibilité pour vérifier que le robot peut atteindre toutes les couches et positions
Téléchargements
Modules

 Procédure pas à pas
Procédure pas à pas
2.1. Bonnes pratiques de disposition de cellules
- Schéma de disposition
- Positionnement des palettes
- Assemblage du robot
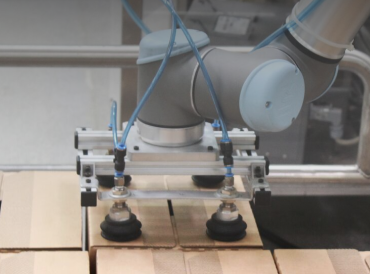
- Montage du préhenseur
 Procédure pas à pas
Procédure pas à pas
2.2. La théorie du test d’accessibilité
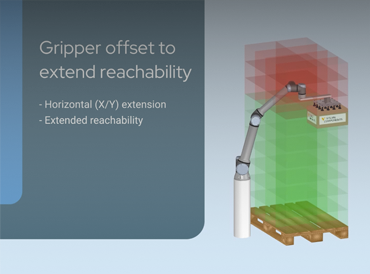
- Accessibilité à toutes les positions
- Détecter les collisions
- Besoin du 7e axe
 Pratique
Pratique
2.3. Cas client - partie 2 : disposition de cellules et test d’accessibilité
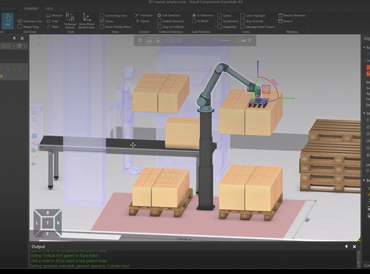
- Disposition de cellules 3D
- Test d’accessibilité
- Conception et montage du préhenseur
Liens connexes

Vérification des objectifs
Vérifiez si vous avez atteint tous les objectifs de cette étape et si vous avez tout ce dont vous avez besoin pour continuer.
Suivant étape :
3. Choix et test du préhenseur
Une fois votre station de palettisation en place et le test d’accessibilité réalisé, l’étape suivante consiste à choisir un préhenseur qui fonctionne bien avec les matériaux que vous palettisez.
Dans cette étape, vous apprendrez comment fonctionnent les différents systèmes de préhension, quels matériaux conviennent à leur utilisation et pourquoi il est essentiel d’effectuer un test de préhension avant d’acquérir un préhenseur.