Fermer 
Choose your language

Cours de base e-Series
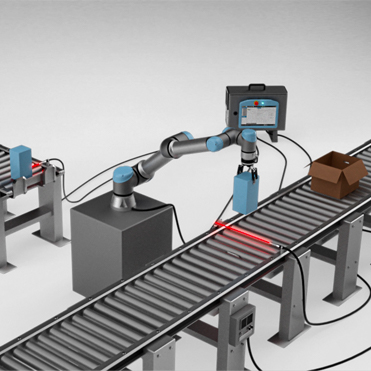
Les cours de base enseigne tous les concepts essentiels, la terminologie et les commandes de programmation nécessaires au fonctionnement d’un robot UR. Les 8 modules sont une simulation étape par étape de la configuration et de la programmation d’une application complète de pick-and-place .
Navigateur et paramètres recommandés. Nous recommandons d’utiliser la dernière version de Microsoft Edge ou Google Chrome pour afficher les modules de e-Learning. JavaScript doit être activé.
Modules
1. Présentation : Le robot en un coup d’œil
Ce module vous donne une brève introduction au robot, à l’interface d’utilisateur, aux E/S et aux fo…
 7m
7m

2. Préparation de la tâche d’un robot
Dans ce module, vous préparerez le robot pour la tâche pick-and-place en connectant un effecteur et…
6m

3. Configuration d’un outil
Apprenez à trouver et configurer le point central de l’outil, à enseigner l’orientation de l’outil e…
17m
4. Créer un programme
Dans ce module, vous apprendrez les différents types de déplacement du robot et vous programmerez to…
12m
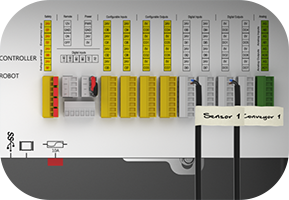
5. Interaction avec les appareils externes
Dans ce module, vous apprendrez comment commander le préhenseur, interagir avec les capteurs et modi…
11m
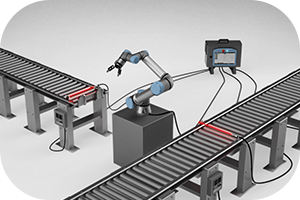
6. Contrôle des convoyeurs
Dans ce module, vous apprendrez à contrôler les convoyeurs à l'aide d'un thread.
10m
7. Paramètres de sécurité
Dans ce module, vous apprendrez à appliquer différents réglages de sécurité à l’application pick-and…
15m
8. Optimisation
Dans ce module, vous apprendrez comment optimiser l’application pick-and-place en ajoutant un rayon…
6m