

Formation en ligne UR20/30
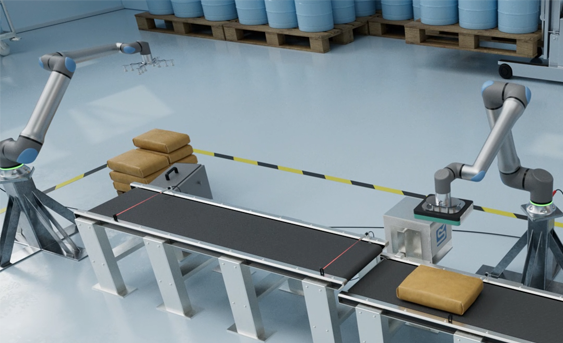
Entrez dans le monde de l’automatisation et rejoignez le superviseur, Bryan, à l’usine où vous apprendrez de réelles compétences pratiques dans cette formation immersive. Essayez-vous à différentes tâches concrètes avec Bryan qui vous guidera à travers chaque étape de la configuration et de la programmation d’un robot UR20.
Si vous êtes novice en robots Universal Robots, vous devez commencer ici !
Logiciel: PolyScope 5
REMARQUE : Contenu disponible en anglais uniquement.
Navigateur et paramètres recommandés. Nous recommandons d’utiliser la dernière version de Microsoft Edge ou Google Chrome pour afficher les modules de e-Learning. JavaScript doit être activé.

 15m
15m

 20m
20m
 8m
8m
 17m
17m
 11m
11m
 8m
8m
 11m
11m
 12m
12m
 10m
10m
 10m
10m

Félicitations !
Vous avez terminé tous les modules de cette voie de formation en ligne. Pourquoi ne pas passer à la prochaine voie ou suivre un cours de formation ?
Pour en savoir plus, assistez à l’un de nos cours de formationAccéder à la présentation de la formation en ligne gratuite