Abschluss 
Choose your language

Video-Tutorials
Entdecken Sie Schritt-für-Schritt-Programmierbeispiele und Tutorials, die Ihnen den Einstieg in die Produkte von Universal Robots erleichtern sollen.
Wenn Sie die Grundlagen der Programmierung eines UR-Roboters erlernen möchten, sehen Sie sich den Bereich „Kostenloses E-Learning “ an, in dem Sie interaktive e-Learning-Angebote für Roboter der UR20/30, e-Serie und für CB3-Roboter finden.

1 Erste Schritte mit Projekten in UR Studio
Erfahren Sie, wie Sie Roboterprogrammierprojekte in UR Studio mithilfe von Vorlagen oder benutzerdef…
 1m 21s
1m 21s


2 Navigieren durch die Station in UR Studio
Entdecken Sie, wie Sie die Stationsansicht und Roboterobjekte in UR Studio mit den Werkzeugen Schwen…
1m 55s

3 Bauen Sie Ihre Arbeitszelle mit dem UR-Studio-Katalog
Erfahren Sie, wie Sie in UR Studio schnell eine Roboterarbeitszelle erstellen, indem Sie mithilfe de…
1m 47s

4 Kollisionserkennung im UR Studio
Entdecken Sie, wie UR Studio Kollisionen in Ihrem Roboter-Arbeitszellen-Setup hervorhebt, um ein sic…
0m 40s

5 Erreichbarkeit des Testroboters im UR-Studio
Erfahren Sie, wie Sie die Robotererreichbarkeit in UR Studio bewerten können, um das optimale Robote…
1m 29s

6 Automatisieren der Förderbandsteuerung mit einem Sensor
Erfahren Sie, wie Sie das Förderverhalten in UR Studio mithilfe von Sensoren und Signalverbindungen…
1m 18s

7 Importieren von 3D-Modellen in UR Studio
Erfahren Sie, wie Sie benutzerdefinierte 3D-Modelle als Zubehör, Werkstücke oder End-of-Arm-Werkzeug…
0m 48s

8 Importieren von benutzerdefinierten Werkstücken in UR Studio
Erfahren Sie, wie Sie externe 3D-Modelle als Werkstücke in UR Studio importieren und konfigurieren,…
1m 11s

9 Importieren und Konfigurieren von End-of-Arm-Tools in UR Studio
Erfahren Sie, wie Sie benutzerdefinierte End-of-Arm-Tools in UR Studio importieren, positionieren un…
1m 24s

10 Installieren von UR-Cap-Paketen in UR Studio
Erfahren Sie, wie Sie URCap-Pakete in UR Studio hochladen, installieren und verwalten und Front-End-…
1m 03s

11 Punkte direkt mit der Schattenprogrammierung unterrichten
Entdecken Sie, wie Sie Roboterbewegungen in UR Studio mithilfe der Schattenprogrammierung schnell ei…
1m 06s
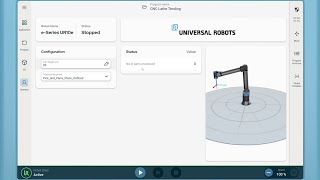
1 Einführung in das GUI von PolyScope X
In diesem Modul sehen Sie die brandneue Benutzeroberfläche von PolyScope X und wo Sie welche Funktio…
2m 35s
2 Konfiguration eines Werkzeugs mit Hilfe des Assistenten
Erfahren Sie, wie Sie mit den Assistenten die Nutzlast, den Schwerpunkt (CoG), den Werkzeugmittelpun…
3m 28s

3 Wie man ein einfaches Pick-and-Place-Programm erstellt
In diesem Video zeigen wir, wie man ein einfaches Pick-and-Place-Programm mit PolyScope X erstellt.
3m 27s
4 Verwendung von Modulen und Funktionen zur Verbesserung der Lesbarkeit und Wiederverwendbarkeit Ihres Programms
Lernen Sie, wie man Module und Funktionen erstellt. Dies erhöht die Lesbarkeit Ihres Programms und e…
2m 49s
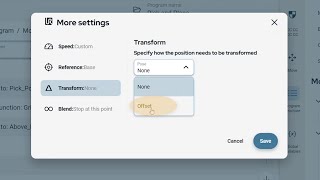
5 Positionen mit Offsets transformieren, um die Anzahl der Wegpunkte zu minimieren
Erfahren Sie, wie Sie einen Wegpunkt mit Hilfe eines benutzerdefinierten Offsets transformieren könn…
2m 18s

6 Erstellen eines Rasters in Ihrer Anwendung
Erfahren Sie, wie Sie die Rasterfunktion in PolyScope X nutzen können, um die Anzahl der benötigten…
2m 27s
7 Eine einfache CNC-Anwendung mit Raster, Modulen und Funktionen sowie Transformationen
In diesem Modul werden folgende Funktionen behandelt: Module und Koordinatensysteme, Raster und Tran…
3m 21s
8 Funktionen des Bedienerbildschirms
Lernen Sie, wie Sie den Bedienerbildschirm einrichten, wie Sie Eingabevariablen und Auswahlmöglichke…
3m 45s

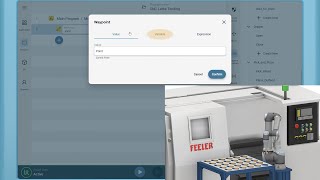
9 Kurze Durchführung der CNC-Drehmaschinen-Vorlage
Sehen Sie sich einen kurzen Durchlauf der Vorlage für eine CNC-Drehmaschinenanwendung an. Lernen Sie…
1m 26s
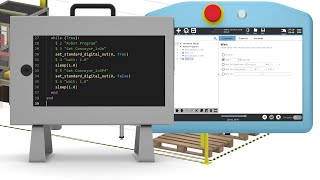
1 Einführung in URScript
Hier erhalten Sie eine Einführung, wo Sie URScript bereits verwendet haben. Wo Sie die gängigsten Fu…
7m 46s

2 Architektur der Systemausführung
Überblick über die Systemausführungsarchitektur von URScript, um zu erklären, „was wohin geht“ https…
8m 54s
3 Konvertierung von Node zu URScript
Eine einfache Anleitung, wie ein Programm in URScript umgewandelt werden kann. Dies vermittelt ein g…
3m 33s
4 Dashboard Server
Erfahren Sie, wie Sie eine TCP/IP-Socket-Verbindung https://docs.universal-robots.com/tutorials/ursc…
4m 09s
5 Schnittstellen und Remote-URScript
Verschaffen Sie sich einen Überblick über die verschiedenen Kommunikationsschnittstellen https://www…
7m 15s
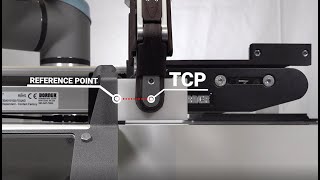
Werkzeugkonfiguration: TCP, Orientierung, Nutzlast und Schwerpunkt
Dieses Tutorial führt Sie durch alle Schritte zur Konfiguration eines Werkzeugs/Endeffektors.
4m 33s

Lernen Sie alles zum Thema Maschinenbeschickung mit Universal Robots
Testen Sie unser neues Modul zur Maschinenbeschickung in der „e-Series Application Track“ unter „Onl…
3m 05s

Bessere und schnellere Programmierung dank eingeschränktem Freedrive
Ab der Softwareversion 5.8 von Polyscope ist es möglich, die Rotationen oder die linearen Bewegungen…
2m 40s

Verhindern einer Kollision nach Programmstopp mit einer „BeforeStart-Sequenz“.
Kollidiert Ihr Roboter mit seiner Umgebung, wenn er nach einem Programmstopp neu gestartet wird? Die…
4m 59s
Messen der Objektdimension nur mit einem Greifer
Erfahren Sie, wie Sie den Roboter so programmieren, dass er die Abmessungen von Objekten nur mit ein…
5m 57s
Anleitung zur Verwendung des Kraftsensors zum Erkennen von Objekten
Anleitung zur Verwendung des Kraftsensors zum Erkennen von Objekten (Richtungsbefehl/Bewegen bis Wer…
3m 54s
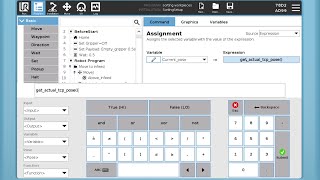
Anleitung zum Ausrichten des aktiven TCP an einem Merkmal
In diesem Video-Tutorial erfahren Sie, wie Sie den aktiven TCP an einem Merkmal ausrichten
1m 44s
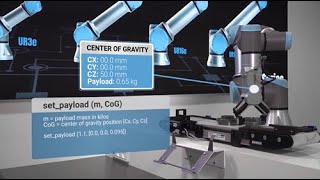
CB3: Anleitung zum Ändern der Nutzlast und des Schwerpunkts während der Programmausführung
In diesem Video-Tutorial erfahren Sie, wie Sie die Nutzlast und den Schwerpunkt während der Programm…
2m 42s

Sicherheit: Begrenzen des Winkels für die Werkzeugrichtung
Erfahren Sie, wie Sie Ihre Anwendung sicherer gestalten können, indem Sie den Winkel begrenzen, in d…
3m 44s

Sicherheit: Gelenk- und Geschwindigkeitsgrenzen festlegen
Erfahren Sie, wie Sie den Bewegungsumfang und die Geschwindigkeit für jedes einzelne Robotergelenk a…
2m 47s

Sicherheit: Erstellen und Konfigurieren von Sicherheitsebenen
Erfahren Sie, wie Sie Sicherheitsebenen erstellen und konfigurieren können. Damit können Sie verhind…
2m 00s

1 Unboxing
2m 10s

2 Hardware Installation
3m 16s

3 Software Setup
0m 41s

4 Calibration
1m 36s