Abschluss 
Choose your language

e-Series Core Track
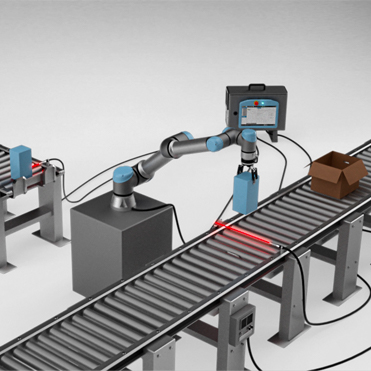
Der Core Track vermittelt alle wesentlichen Konzepte sowie die Terminologie und die Programmierbefehle, die für die Bedienung eines UR-Roboters erforderlich sind. Die 8 Module sind eine Schritt-für-Schritt-Simulation der Einstellung und der Programmierung einer kompletten Pick-and-Place-Anwendung.
Empfehlungen für Browser und Einstellungen. Wir empfehlen die Verwendung der aktuellen Version von Microsoft Edge oder Google Chrome, um die E-Learning-Module anzuzeigen. JavaScript muss aktiviert sein.
Module
1. Einstieg: Der Roboter auf einen Blick
Dieses Modul bietet Ihnen eine kurze Einführung in den Roboter, die Benutzeroberfläche, E/As und Fun…
 7m
7m

2. Vorbereitung einer Roboter-Aufgabe
In diesem Modul bereiten Sie den Roboter auf eine Pick-and-Place-Aufgabe vor, indem Sie einen Endeff…
6m

3. Werkzeugeinrichtung
Erfahren Sie, wie Sie den Tool Center Point finden und konfigurieren, wie Sie die Werkzeugorientieru…
17m
4. Ein Programm erstellen
In diesem Modul lernen Sie die verschiedenen Bewegungsarten des Roboters kennen und programmieren al…
12m
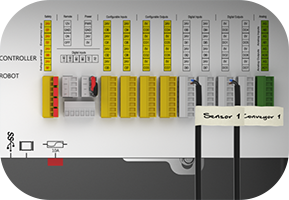
5. Interaktion mit externen Geräten
In diesem Modul lernen Sie, wie man den Greifer bedient, mit Sensoren interagiert und die Nutzlast m…
11m
6. Steuern von Förderbändern
In diesem Modul werden Sie lernen, wie die Förderbänder mithilfe eines Threads gesteuert werden.
10m
7. Sicherheitseinstellungen
In diesem Modul lernen Sie, wie Sie verschiedene Sicherheitseinstellungen auf die Pick-and-Place-Anw…
15m
8. Optimierung
In diesem Modul lernen Sie, wie Sie die Pick-and-Place-Anwendung optimieren können, indem Sie den Ve…
6m