

Zellenlayout und Erreichbarkeitstest
Welchen Roboter benötigen Sie für Ihre Palettierstation? Und wo stellen Sie die Palette(n) und den Roboter auf? Wie stellen Sie sicher, dass der Roboter alle Palettenpositionen erreichen kann?
In diesem Schritt lernen Sie Best Practices des Zellenlayouts kennen, damit Sie einen ersten Entwurf Ihrer eigenen Palettierstation erstellen können.
Sie lernen auch, wie Sie einen Erreichbarkeitstest in einem Simulationswerkzeug durchführen, um zu verifizieren, dass der Roboter alle Schichten und Positionen auf der Palette erreichen kann und dass der Roboter mit keinen Objekten kollidiert. Der Erreichbarkeitstest hilft Ihnen auch festzustellen, welche Art von Greifer Sie benötigen und ob Sie eine 7. Achse benötigen.
- Den ersten Entwurf der Palettierstation erstellen
- Einen Erreichbarkeitstest durchführen, um sicherzustellen, dass der Roboter alle Schichten und Positionen erreichen kann
Downloads
Module

 Walkthrough
Walkthrough
2.1. Best Practices für Zellenlayout
- Layoutdesign
- Palettenpositionierung
- Roboterbefestigung
- Greifermontage
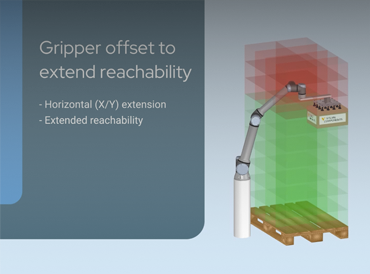 Walkthrough
Walkthrough
2.2. Die Theorie des Erreichbarkeitstests
- Erreichbarkeit aller Positionen
- Kollisionen erkennen
- Notwendigkeit der 7. Achse
 Praxis
Praxis
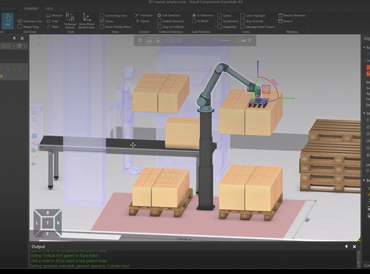
2.3. Kundenfall – Teil 2: Zellenlayout und Erreichbarkeitstest
- 3D-Zellenlayout
- Erreichbarkeitstest
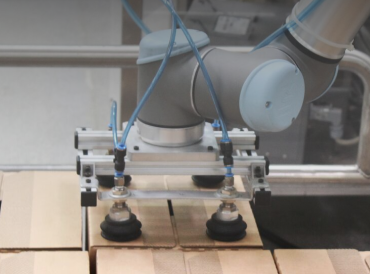
- Greiferkonstruktion und -montage
Verwandte Links

Ziele überprüfen
Überprüfen Sie, ob Sie alle Ziele für diese Phase erreicht haben und Sie haben alles, was Sie brauchen, um fortzufahren.
Nächste Stufe :
3. Greiferauswahl und -prüfung
Wenn Sie das Layout Ihrer Palettierstation fertiggestellt und einen Erreichbarkeitstest durchgeführt haben, wählen Sie im nächsten Schritt einen Greifer aus, der gut mit den von Ihnen palettierten Materialien funktioniert.
In dieser Phase erfahren Sie, wie verschiedene Greifsysteme funktionieren, für welche Materialien sie geeignet sind und warum es unerlässlich ist, vor der Investition in einen Greifer einen Greiftest durchzuführen.