关闭 
Choose your language

视频教程
探索逐步编程示例和教程,助您轻松上手Universal Robots产品。
如果您想学习UR机器人编程的基本知识,请查看“免费网络课程”部分,其中提供UR20/30, e-Series(e系列)和CB3机器人的线上互动学习。

1 在UR Studio中开始使用项目
了解如何使用模板或自定义设置在UR Studio中创建、打开、保存和管理机器人编程项目。
 1分21秒
1分21秒

2 在UR Studio中导航视图
了解如何使用平移、轨道、移动和旋转工具在UR Studio中导航和工作站视图和机器人对象。
1分55秒

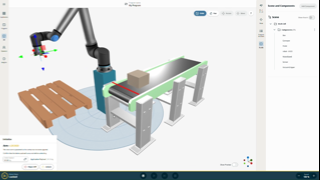
3 使用UR Studio目录构建您的工作站
了解如何通过使用目录添加支架、输送机、托盘和末端工具等组件,在UR Studio中快速构建机器人工作站。
1分47秒

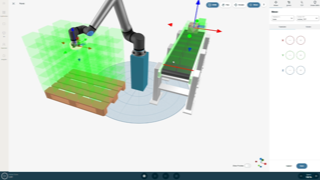
4 UR Studio中的碰撞检测
了解UR Studio如何在您的机器人工作站设置显示碰撞,以帮助确保安全准确的布局设计。
0分40秒

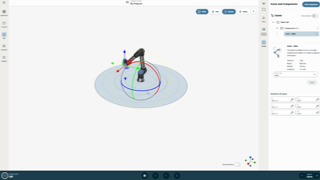
5 在UR Studio中测试机器人可达性
了解如何在UR Studio中评估机器人可达性,为您的工作站布局选择最佳机器人型号。
1分29秒
6 使用传感器实现控制输送机自动化
了解如何在UR Studio中使用传感器和信号连接来自动化输送机,以便在检测到箱子时停止移动。
1分18秒
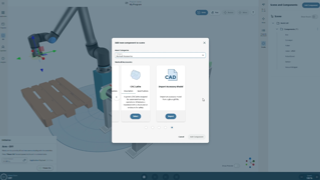
7 将3D模型导入UR Studio
了解如何使用GLB或GLTF格式将自定义3D模型作为配件、工件或末端工具导入UR Studio。
0分48秒

8 将自定义工件导入UR Studio
了解如何在UR Studio中将外部3D模型导入和配置为工件,包括缩放和定位以实现精确模拟。
1分11秒

9 在UR Studio中导入和配置手臂末端工具
了解如何在UR Studio中导入、定位和配置自定义末端工具,包括碰撞调整和抓手区域设置。
1分24秒

10 在UR Studio中安装UR Cap软件包
了解如何在UR Studio中上传、安装和管理URCap包,支持前端扩展以增强功能。
1分03秒
11 使用影子编程直接示教编程
了解如何使用阴影编程在UR Studio中快速示教机器人运动,而无需手动慢跑机器人。
1分06秒
1_ Polyscope X界面介绍
在本模块中,您将看到 PolyScope X 全新的图形用户界面,以及在哪里可以找到什么。
接下来的模块将深入探讨其功能。
2分35秒
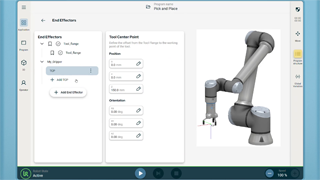
2_ Polyscope X设置和配置
了解如何配置工具,即在何处激活 I/O、设置并激活工具中心点 TCP 和重心 CoG。
0分58秒

3_创建简单抓放程序
在本视频中,我们将展示如何使用 PolyScope X 制作一个简单的拾取和放置程序。
3分27秒
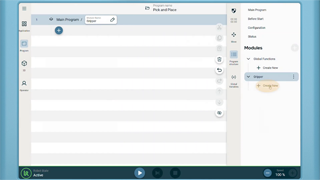
4_模块和功能
学习如何制作模块和函数。这将提高程序的可读性,并使其易于重复使用不同的参数。
2分49秒
5_转换和偏移
了解如何使用用户定义的偏移量转换航点。这将最大限度地减少程序中所需的航点数量,这就是你需要调整程序的聪明之处。
2分18秒

6_码垛网格
了解如何使用 PolyScope X 中的网格功能,以尽量减少所需的航点数量。(它类似于 PolyScope 5 中码垛向导的基本布局)。
2分27秒
7_简易CNC应用
本模块的功能包括 模块和函数、网格和带偏移量的变换用于创建一个简单的数控应用程序。
3分21秒
8_操作员界面
了解如何设置操作员屏幕。如何让操作员可以访问输入变量和选择,以及如何在操作员屏幕上直接显示应用值。
3分45秒

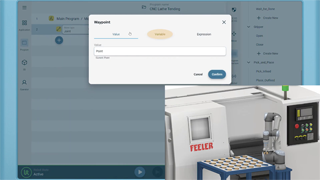
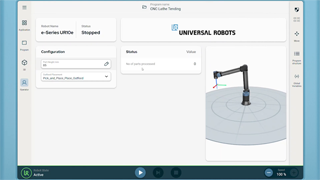
9_CNC_模板
请看数控车床应用模板的简短演示。教授关键航点,配置数控机床与 I/O 的连接,并进行一些调整,然后就可以开始工作了。更多信息请访问:www.universal-robots.com/products/…
1分26秒

工具配置:TCP,方向,有效载荷和重心
本教程将引导您完成配置工具/末端执行器的所有步骤
4分02秒

利用“启动前序列”防止程序停止后发生碰撞
您是否经历过机器人在程序停止后重启时与周围环境发生碰撞的情形?本教程将向您展示如何利用“启动前序列”防止发生碰撞
4分59秒
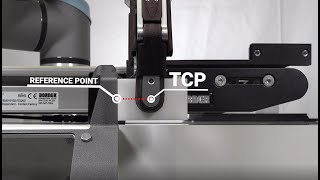
仅使用夹持器测量物件尺寸
学习如何对机器人编程,仅利用一个夹持器和一个基准点测量物件尺寸。高度适合质量检验和分拣任务。
5分57秒
如何运用力传感器检测物件
如何运用力传感器检测物件(方向指令/移动直至工具接触)
3分54秒
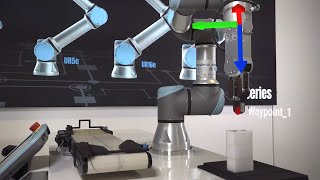
如何针对一项功能校准活动TCP
在本视频教程中,您将学习如何针对一项功能校准活动TCP。
1分44秒
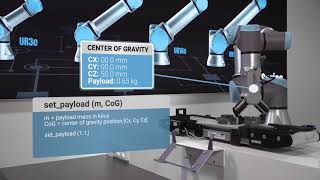
如何在程序执行过程中更改有效负载和重心
在本视频教程中,您将学习如何在程序执行期间更改有效负载和重心。
2分42秒

使用约束型自由驱动(freedrive)改进编程和加快速度
"从Polyscope的5.8版本开始,使用freedrive时,可以在线性轴上约束旋转或移动,使得编程速度更快,也更加容易。本教程展示了4个典型的用例:
- 利用工具功能转换
- 利用定制功能转换…
2分40秒
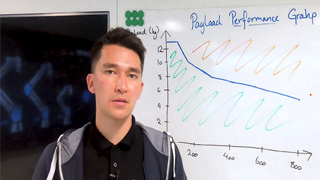
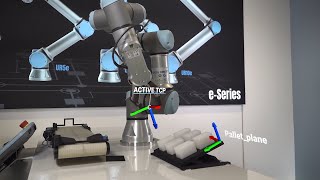
UR10E的最大有效载荷曲线介绍及其码垛应用
此视频将有助于您理解最大有效载荷曲线新定义,小型的码垛应用将向您展示机器人在重心距离偏移较远时,仍可以按照正常运行性能工作。
6分58秒

优傲e系列机器人G代码工具路径导入功能讲解
有助于您理解优傲e系列机器人G代码工具路径导入功能,使用它将实现自动化编程,可利用CAD,CAM等软件为机器人编程,大幅缩短机器人编程时间。
4分03秒

安全:限制工具方向角度
了解如何通过限制机械臂末端工具可指向的角度使应用更加安全
3分44秒

安全:创建并配置安全平面
了解如何创建和配置安全平面。在正常模式、缩减模式或这两种模式下,设置和防止机器越过安全平面;也可以触发缩减模式。
2分00秒

安全:设置关节限制和速度
了解如何限制机器人各个关节的运动范围和速度
2分47秒