关闭 
Choose your language

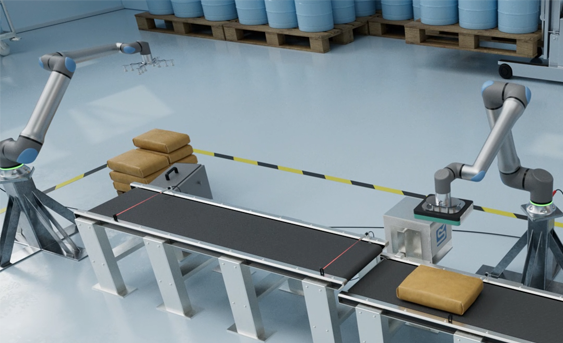
UR20/30 网络课程
走进自动化世界,与主管 Bryan 一起置身工厂车间,在身临其境的培训体验中,学习扎实的实践技能。在 Bryan 指导您设置和编程 UR20 机器人的每个步骤时,您可以尝试许多不同的现实生活任务。
如果您是优傲机器人的新用户,可以从这里开始!
软件:PolyScope 5
注意:内容仅提供英文版。
建议的浏览器和设置。 我们建议使用最新版本的 Microsoft Edge 或 Google Chrome,查看网络课程模块。必须启用 JavaScript。
模块

1.硬件概述和设置
在第一个模块中,您首先要了解机器人的硬件和软件。然后,安装末端执行器,并连接控制箱中的设备,为机器人执行任务做好准备。最后,在软件中,设置设备,并保存安装文件。
 15分钟
15分钟


2.配置工具
在模块 2 中,您将学习与配置模块 1 中安装的夹爪相关的基本概念和步骤。之后,您将使用新学到的技能配置夹爪。
20分钟
3.运动和动作类型
在模块 3 中,您将了解机器人的不同动作类型,以及如何在移动屏幕移动机器人。
8分钟

4.创建程序
在模块 4 中,您将利用在模块 3 中学习到的有关运动和动作类型的知识,开始创建一个将袋子从托盘移到传送带上的程序。
17分钟

5.拣取和放置
在模块 5 中,您将添加命令,处理来自传感器的输入、操作夹爪和更改有效载荷。
您还将学习如何向路点添加“move until”(移动直至)命令。
11分钟

6.机器人之间的通信
在本模块中,您将学习如何设置两个机器人之间的通信,以实现同步操作。
8分钟

7.输送带控制
在模块 7 中,您将学习如何使用条件语句,结合来自贴标机器人的传感器输入和寄存器数据,控制输送带。
11分钟

8. 力度控制
本模块主要教您如何利用机器人的力控制功能精确贴标。您将深入了解如何配置力和扭矩设置,以确保正确粘附每个标签。
12 分钟

9. 码垛
在本模块中,您将学习如何使用软件的码垛模板将袋子装载到托盘上。
10 分钟

10.生产设置
在本模块中,您将通过连接控制面板和配置机器人进行远程控制,为生产做好准备。
10 分钟
