关闭 
Choose your language

e 系列核心专题
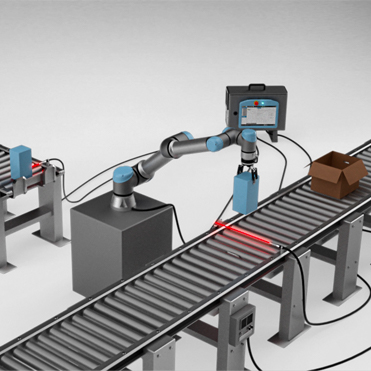
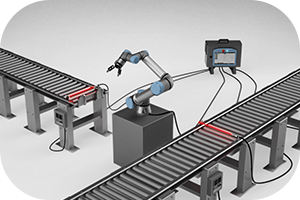
核心专题会教授操作 UR 机器人所需的所有基本概念、术语和编程命令。这 8 个模块会步进式模拟为完整的抓放应用进行设置和编程。
建议的浏览器和设置。 我们建议使用最新版本的 Microsoft Edge 或 Google Chrome,查看网络课程模块。必须启用 JavaScript。
模块
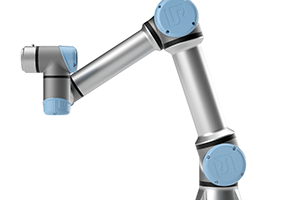
1. 概览:机器人概览
本模块为您提供了一份关于机器人、用户界面、I/O 和各功能的简短介绍。
 7 分钟
7 分钟

2. 安排一项机器人任务
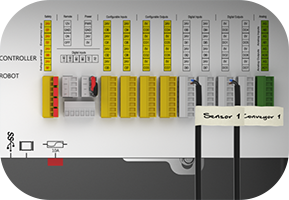
在本模块中,您将通过连接末端执行器及连接和配置传感器与输送机让机器人做好抓放任务准备工作。
6分钟

3. 设置工具
学习如何查找及配置工具中心点、如何教授工具方向,以及如何教授重心和有效负载。在本模块末尾处,您将为模块 2 中准备的抓放应用配置夹爪。
17分钟
4. 创建程序
在本模块中,您将了解机器人的不同移动类型,然后您将对抓放应用所需的所有动作和路点进行编程。
12分钟
5. 与外部设备互动
在本模块中,您将学习如何利用设置和等待命令操纵夹爪、与传感器交互,以及改变有效负载。最后,您将对抓放应用所需的设置和等待命令进行编程。
11分钟
6. 控制输送机
在本模块中,您将学习如何用线程控制输送机。
10分钟
7. 安全设置
在本模块中,您将学习如何将不同的安全设置应用到抓放应用中:
- 如何利用安全扫描仪触发缩减模式
- 如何利用安全扫描仪触发安全停止
- 如何连接与设置防护重置按钮
- 如何连接与设置外部紧急停止按钮
…
15分钟
8. 优化
在本模块中,您将学习如何通过向相关路点中添加交融半径,以及调整速度和加速度来优化抓放应用。
6分钟