

Rozložení buněk a test dosažitelnosti
Jakého robota potřebujete pro svou paletizační stanici? A kam umístíte paletu (palety) a robota? Jak zajistíte, aby robot dosáhl na všechny pozice palet?
V tomto kroku se seznámíte s osvědčenými postupy uspořádání buněk, které vám umožní vytvořit první návrh vlastní paletizační stanice.
Dozvíte se také, jak provést test dosažitelnosti v simulačním nástroji, abyste ověřili, že robot dosáhne na všechny vrstvy a pozice na paletě a že robot nenarazí do žádného objektu. Test dosažitelnosti vám také pomůže určit, jaký typ uchopovače potřebujete a zda potřebujete 7. osu.
- Vytvoření prvního návrhu paletizační stanice
- Proveďte test dosažitelnosti, abyste ověřili, že robot dosáhne na všechny vrstvy a pozice.
Ke stažení
Moduly

 Průchod
Průchod
0.1. Osvědčené postupy pro uspořádání buněk
- Návrh rozvržení
- Umístění palet
- Montáž robota
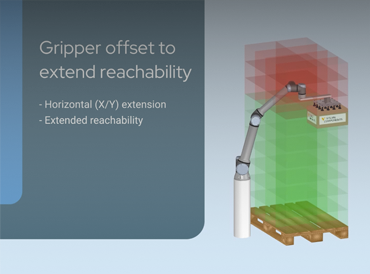
- Montáž uchopovače
 Průchod
Průchod
0.2. Teorie testu dosažitelnosti
- Dosažitelnost všech pozic
- Zjišťování kolizí
- Potřeba 7. osy
 Praktický přístup
Praktický přístup
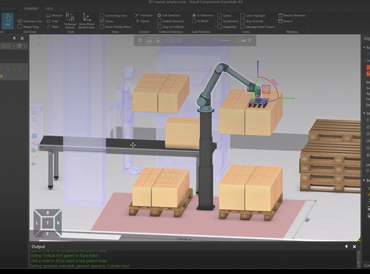
0.3. Případ pro zákazníka - část 2: rozložení buněk a test dosažitelnosti
- Rozložení 3D buněk
- Test dosažitelnosti
- Konstrukce a montáž uchopovače
Související odkazy

Kontrola cílů
Ověřte si, zda jste dosáhli všech cílů této fáze a zda máte vše, co potřebujete k pokračování.
Další fáze :

1. Dokumentace stávajícího procesu
Prvním krokem k automatizaci procesu paletizace je znát všechny její základy. Nástroj pro hodnocení paletizace uvedený v tomto kroku vám pomůže zdokumentovat všechny důležité aspekty procesu, které budete potřebovat při plánování projektu. Nástroj vám také poskytne zprávu, která upozorní na potenciální třecí místa ve vašem procesu a poskytne doporučení, jak tato třecí místa odstranit nebo omezit.
Po dokončení tohoto kroku budete mít jasnou představu o složitosti svého projektu. Budete znát potenciální třecí plochy ve vašem procesu a vědět, jak je omezit.